Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Цели моделирования в задачах автоматизации технологических и организационно-экономических систем.
Перечень важнейших свойств объекта, требования к виду модели, ее точности определяется ЦЕЛЯМИ МОДЕЛИРОВАНИЯ.
ЦЕЛИ МОДЕЛИРОВАНИЯ В ЗАДАЧАХ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ
• определение оптимального технологического режима для отдельного технологического агрегата, участка и производства;
• оптимальное распределение потоков между параллельно работающими агрегатами;
• выбор структуры регулятора технологического параметра;
• оптимизация настроек регулятора;
• диагностика причин нарушения технологического регламента;
• прогнозирование и предупреждение аварийных ситуаций;
• реализация адаптивных систем управления.
•
ЦЕЛИ МОДЕЛИРОВАНИЯ В ЗАДАЧАХ УПРАВЛЕНИЯ ОРГАНИЗАЦИОННО-ЭКОНОМИЧЕСКИМИ ОБЪЕКТАМИ
• определение оптимального плана производства;
• выбор оптимальных объемов запасов сырья, материалов и полуфабрикатов;
• прогнозирование изменения спроса рынка на производимую продукцию;
• обоснованное выделение лимитов на энергоресурсы для подразделений предприятия.
Моделирование переходных процессов в динамических системах на ЭВМ методом структурного моделирования.
Существуют различные способы моделирования на ЭВМ переходных процессов в динамических системах. Выбор алгоритмов моделирования в основном определяется формой математического описания системы и имеющимся программным обеспечением. Если система задана обыкновенными дифференциальными уравнениями, то чаще всего применяют численные методы интегрирования. Наиболее распространенной в программном обеспечении ЭВМ является реализация метода Рунге – Кутта /9/.
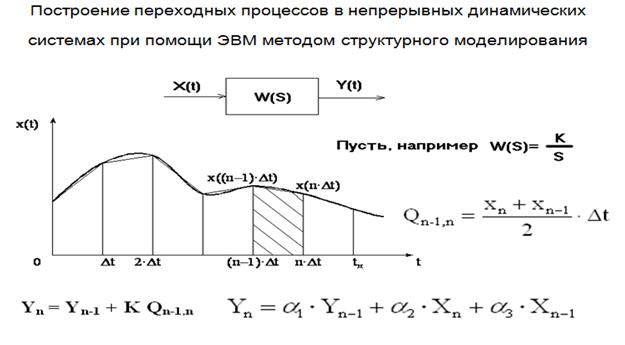
Если динамическая система задана структурной схемой, то переходные процессы в ней удобно строить при помощи метода структурного моделирования/8/. Суть метода состоит в том, что ЭВМ по рекуррентным формулам последовательно вычисляет значения выходов отдельных звеньев системы в дискретные равностоящие моменты времени. Получение рекуррентных формул для звеньев первого порядка продемонстрируем на примере определения реакции y(t) идеального интегрирующего звена на произвольное непрерывное воздействие x(t).

Рисунок 5 – Аппроксимация входного сигнала
Время tн наблюдения за рассматриваемым звеном разобьем на большое число достаточно малых интервалов длительностью Δt. На каждом таком интервале сигнал x(t) заменим прямой, проходящей через точки x((n–1)∙Δt) и x(n∙Δt) (прямой, которая на границах интервала совпадает с исходной кривой x(t)), где n – номер интервала. В результате исходный сигнал x(t) аппроксимируется ломаной линией, представленнойна рис. 5.
Введем обозначения
xn = x(nΔt); yn = y(nΔt);.
Как следует из геометрического смысла определенного интеграла, выход идеального интегрирующего звена может быть вычислен по следующей формуле:
yn = yn-1 + K ∙ Qn;n-1 ,
где Qn;n-1 – площадь фигуры, ограниченной кривойвходного сигнала x(t) на интервале времени ((n–1)∙Δt, n∙Δt) осью времени t, а также перпендикулярами к оси t в точках (n–1)∙Δt и n∙Δt.
При линейной аппроксимации входного сигнала эта фигура является трапецией (на рис. 4.1 заштрихована). Площадь трапеции
 .
.
Таким образом,
 .
.
Можно показать, что для всех линейных звеньев первого порядка уравнение имеет вид
yn = α1∙yn-1+ α2∙xn+ α3∙xn-1, (4)
где α1, α2, α3 – числовые коэффициенты, зависящие от типа и параметров звена, а также от выбранной величины интервалаΔt.Для высокой точности моделирования переходных процессов в звене Δt должно быть достаточно малым. В табл. 3 приведены значения коэффициентов α1, α2, α3 и максимально допустимые величины интервалов Δt для некоторых звеньев первого порядка.
Таблица 1- Значения коэффициентов α1, α2, α3 и Δtmax для некоторых
Звеньев первого порядка
| Передаточная функция звена | α1 | α2 | α3 | Δtmax |

| 
| α2 | 
| |

| 
| -α2 |
| |

| 
| 
| 
| 
|

|
| 
| -α2 |
|

| 
| 
| 
|
Для колебательного звена рекуррентная формула имеет сложный вид, поэтому целесообразно это звено, передаточная функция которого имеет вид
 ,
,
заменять эквивалентной схемой (рис. 6).
Рисунок 6 – Схема замещения колебательного звена
Рассмотримтеперь процедурумоделирования переходных процессов в замкнутойдинамической системе на примере построения переходной характеристики системы, структурная схема которой приведена на рис. 7.

Рисунок 7 – Замкнутая система
Обозначим значения всех сигналов в системе в момент подачи воздействия x(t)=1(t) (в момент 0+) нулевым индексом. При определении этих значений необходимо учитывать, что выходы интегрирующего – v(t) и апериодического звена первого порядка – y(t) при конечных значениях входных сигналов не имеют разрывов, поэтому v0 = 0 и y0 = 0.
Тогда x0 = 1; e0 = x0–y0 = 1; z0 = 0.2; u0 = v0+z0 = 0.2.
Значения всех сигналов в системе через время Δt (конец интервала) обозначим индексом «1». Расчет начинаем со звена  – первого после элемента сравнения звена. Предположим, что вход этого звена e1 известен (на определении e1 остановимся ниже). Тогда по рекуррентным формулам вида (4) определим v1, как выход интегрирующего звена, входом которого является сигнал e
– первого после элемента сравнения звена. Предположим, что вход этого звена e1 известен (на определении e1 остановимся ниже). Тогда по рекуррентным формулам вида (4) определим v1, как выход интегрирующего звена, входом которого является сигнал e
v1 = α1∙v0 + α2∙e1 + α3∙e0, (5)
где коэффициенты α1, α2, α3 – находим по табл. 3. z1 является выходом безинерционного звена с коэффициентом усиления, равным 0.2
z1 = 0.2∙e1; u1 = v1 + z1 = v1 + 0.2∙e1.
В свою очередь, u является входом апериодического звена первого порядка, выход которого у1 определяется по формуле, аналогичной (5). Таким образом, вычислен выходной сигнал системы. Вернемся к определению значения e1 (вначале мы предположили его известным).Для того, чтобы вычислить e1 = x1–y1, необходимо знать y1. Однако вначале y1 неизвестно, поэтому вместо него используется y0 – значение сигнала обратной связи в начале интервала Δt. При малом значении Δt отличие y0 и y1 незначительно, но все-таки оно вносит определенную ошибку в e1, а значит и в v1, z1, u1 и y1, вычисляемые с использованием e1. Для повышения точности расчет всех сигналов для этого временного интервала можно повторить, используя в определении e1, найденное значение y1. Такое повторение производится до тех пор, пока уточняемые решения не станут достаточно близкими. После этого необходимо перейти к следующему временному интервалу.
Необходимо отметить, что при моделировании переходного процесса, в рекуррентных формулах используются значения сигналов только в два момента времени – в начале и в конце интервала Δt. Поэтому в памяти ЭВМ можно хранить также только по два таких значения. Закончив расчет для n-говременного интервала и получив значения всех сигналов в конце этого интервала (сигналы с индексом «1»), необходимо записатьих в массив, предназначенный для хранения значений сигналов в начале интервала (сигналов с индексом «0»). Так как момент окончания n-го интервала совпадает с началом (n+1)-го.
При выборе величины Δt необходимо исходить из приведенных в табл. 3 рекомендаций по максимально допустимому значению интервала Δtmax динамических звеньев. Принятая для моделирования величина Δt не должна превышать Δtmax ни для одного из звеньев, входящих в систему.
Отметим что, как правило, время наблюдения за системой разбивается на сотни или тысячи интервалов Δt. Поэтому при разработке программы моделирования необходимо так организовать вывод контролируемых сигналов на дисплей (печать), чтобы объем выводимых данных не был чрезмерным. Это достигается тем, что в течение какого-то числа интерваловΔt переходный процесс просчитывается без вывода на дисплей.
В настоящее время существует целый ряд пакетов прикладных программ, позволяющих моделировать переходные процессы в динамических системах. Среди них можно выделить пакеты СИАМ, СС и особенно MATHLAB в части SIMULINK. Эти пакеты имеют достаточно удобный интерфейс и не требуют знания каких-либо языков программирования. Однако эти пакеты предназначены для использования в офисных компьютерах, их невозможно применять в промышленных контроллерах для оперативной идентификации объектов при реализации адаптивных систем управления. Поэтому владение методикой моделирования переходных процессов с использованием универсальных языков программирования является необходимым элементом подготовки инженера по автоматизации технологических процессов.
Требования к моделям.
1. Модель должна достаточно точно отражать свойства объекта, интересующие исследователя.
2. Модель должна быть проще оригинала.
3. Модель должна быть конструктивной, т.е. удобной в использовании для целей моделирования.
4. Модель должна быть гибкой, т.е. сохранять адекватность реальному объекту при некоторых изменениях его параметров, свойств, режимов функционирования.
Последнее изменение этой страницы: 2016-07-23
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...