Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Конструкция и принцип действия преобразователя
Для измерения линейных перемещений в диапазоне от 0 до 10…20 мм применяются индуктивные преобразователи с разомкнутой магнитной цепью, так называемые преобразователи соленоидного типа.

а) б)
Рисунок 6.1 – Схемы индуктивных преобразователей
На рисунке 6.1 приведены схемы недифференциального (рисунок 6.1,а) и дифференциального (рисунок 6.1,б) преобразователя соленоидного типа. Преобразователь представляет собой катушку, внутри которой помещен ферромагнитный сердечник. При перемещении сердечника внутри катушки изменяется ее индуктивность L, при изменении которой меняется выходное напряжение или ток.
 , (6.1)
, (6.1)
где w – число витков катушки; Rм – сопротивление магнитопровода.
Конструкция широкопредельного индуктивного преобразователя показана на рисунке 6.2.

Рисунок 6. 2 – Конструкция индуктивного преобразователя
соленоидного типа
Преобразователь (рисунок 6.2) собран в цилиндрическом корпусе с наружным диаметром 28 мм. Измерительный стержень 8 преобразователя установлен на шариковой направляющей 7. На одном конце стержня установлен измерительный наконечник 9, оснащенный синтетическим алмазом. На другом его конце установлен ферритовый трубчатый якорь 1. На стержне 8 закреплены два шарикоподшипника 6, предохраняющие его от поворота.
Перемещение трубчатого якоря преобразователя вызывает изменение сопротивлений двухсекционной катушки 2, магнитопровод которой состоит из фсрритовых шайб 4 и экранирующей втулки 3 из магнитомягкой стали. Выводы проводов выполнены экранированным кабелем. Преобразователь надежно герметизирован.
Исходные данные для расчета
Исходными данными для расчета преобразователя являются следующие параметры:
- требуемая относительная чувствительность преобразователя δS, мм-1
- сопротивление катушки Z, Ом;
- частота питающего напряжения  , Гц;
, Гц;
- допускаемая погрешность от нелинейности характеристики  , мкм;
, мкм;
- заданный диапазон измерения Д, мм.
Конструктивные размеры магнитопровода преобразователя показаны на рисунке 6.3.
- длина катушки lk, мм;
- длина сердечника lc = 1,1lk, мм;
- радиус катушки R, мм;
- радиус сердечника r , мм;
- добротность катушки Q.
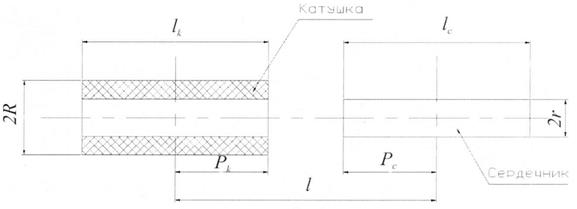
Рисунок 6.3 – Конструктивные размеры магнитопровода
Добротность катушки преобразователя характеризует величину потерь энергии в ней на перемагничивание и вихревые потоки и определяются из выражения.
Q=f L/Rполн, (6.2)
где Rполн = Rпр +Rэ – полное сопротивление катушки преобразователя; Rпр – сопротивление провода катушки;  – сопротивление в схеме замещения индуктивного преобразователя (рисунок 6.4), на котором должна расходоваться мощность Р, равная мощности потерь в сердечнике;
– сопротивление в схеме замещения индуктивного преобразователя (рисунок 6.4), на котором должна расходоваться мощность Р, равная мощности потерь в сердечнике;  – постоянная величина для конкретного преобразователя, не зависящая от величины зазора; Rмс – магнитное сопротивление сердечника; Rмз – магнитное сопротивление воздушного зазора; σП - коэффициент потерь на перемагничивание; σВ – коэффициент потерь на вихревые токи.
– постоянная величина для конкретного преобразователя, не зависящая от величины зазора; Rмс – магнитное сопротивление сердечника; Rмз – магнитное сопротивление воздушного зазора; σП - коэффициент потерь на перемагничивание; σВ – коэффициент потерь на вихревые токи.

Рисунок 6.4 – Схема замещения индуктивного преобразователя
Методика расчета
1. Определение относительной максимальной чувствительности.
Относительная чувствительность  определяется как отношение
определяется как отношение
 , (6.3)
, (6.3)
где  Гн/м – абсолютная чувствительность; ΔL – изменение индуктивности катушки, Гн; Д – диапазон измерений, м.
Гн/м – абсолютная чувствительность; ΔL – изменение индуктивности катушки, Гн; Д – диапазон измерений, м.
Значение максимальной чувствительности определяется по формуле
 , (6.4)
, (6.4)
где Pc = lc/2; Pк = lк /2.
Поскольку преобразователь дифференциальный, тоδSmaxравна
δSmax. диф.=2δSmax (6.5)
Должно выполняться условие
δSmax. диф. ≥ δSТ
2. Определение требуемой индуктивности преобразователя
 . (6.6)
. (6.6)
3. Расчет числа витков ω катушки
 , (6.7)
, (6.7)
где μо = 1,26·10-6 Гн/м – магнитная постоянная μс = 44 – относительная магнитная проницаемость.
4. Расчет на вместимость количества витков проволоки заданного диаметра d в принятые габариты катушки
 , (6.8)
, (6.8)
где K = 0,7…0,9 – коэффициент заполнения катушки; d – диаметр провода.
Если расчетное число витков не помещается в заданные габаритные размеры катушки, т.е.  , то можно увеличить частоту питающего напряжения f, а затем пересчитать требуемую индуктивность L по формуле 6.4 и найти новое число витков катушки (формула 6.5).
, то можно увеличить частоту питающего напряжения f, а затем пересчитать требуемую индуктивность L по формуле 6.4 и найти новое число витков катушки (формула 6.5).
5. Определение индуктивности катушки в среднем положении сердечника
 , (6.9)
, (6.9)
где  .
.
6. Статическая характеристика преобразователя
Зависимость индуктивности L от параметра m имеет вид
 , (6.10)
, (6.10)
где  ; l = 1,1;
; l = 1,1;  – перемещение сердечника;
– перемещение сердечника;  ;
;  .
.
Выражение 6.10 с учетом можно переписать в виде
 . (6.11)
. (6.11)
Для нахождения точек построения статической характеристики, как зависимости  необходимо задаться рядом значений
необходимо задаться рядом значений  от 0 до
от 0 до  с шагом 0,5 мм или 1 мм.
с шагом 0,5 мм или 1 мм.
7. Определение максимальной абсолютной чувствительности преобразователя.
 . (6.12)
. (6.12)
Значение  и
и  определены в пункте 1 и 5. Полученное значение
определены в пункте 1 и 5. Полученное значение  определено в зависимости от перемещения сердечника .
определено в зависимости от перемещения сердечника .
8. Определение чувствительности  в функции от параметра .
в функции от параметра .
 . (6.13)
. (6.13)
9. Уравнение линеаризирующей прямой для функции L = f(m)
 . (6.14)
. (6.14)
Задаваясь рядом значений m получим точки, через которые проведем линеаризирующую прямую.
10. Определение погрешности измерения от нелинейности статической характеристики.
 . (6.15)
. (6.15)
После подстановки  согласно 6.14 в формулу 6.15 имеем
согласно 6.14 в формулу 6.15 имеем
`
 (6.16)
(6.16)
6.3. Индивидуальные расчетные задания
Исходные данные для расчета индуктивного преобразователя в таблице 6.1 и выбираются по последней цифре номера зачетной книжки.
| Таблица 6.1 – Исходные данные | ||||||||||
| Наименование параметра | № варианта | |||||||||
Требуемая относительная чувствительность  , мм , мм
| 0,2 | 0,1 | 0,3 | 0,2 | 0,1 | 0,3 | 0,2 | 0,1 | 0,3 | 0,2 |
| Сопротивление катушки Z, Ом | ||||||||||
| Частота питающего напряжения f, Гц | ||||||||||
Доп. погрешность от нелинейности статич. характеристики  , мкм , мкм
| 0,5 | 0,5 | 0,5 | |||||||
| Диаметр провода d, мм | 0,08 | 0,1 | 0,12 | 0,08 | 0,1 | 0,12 | 0,08 | 0,1 | 0,12 | 0,08 |
| Диапазон измерения Д, мм | 1,5 | 1,5 | 1,5 | 1,5 | ||||||
Длина катушки  , мм , мм
| ||||||||||
| Радиус катушки R, мм | ||||||||||
| Радиус сердечника r, мм | 3,0 | |||||||||
| Добротность катушки Q |
Порядок выполнения работы
1. Изучить теоретические положения.
2. Выполнить эскиз магнитопровода преобразователя (рисунок 6.3) с указанием заданных (таблица 6.1) геометрических размеров.
3. Рассчитать относительную максимальную чувствительность дифференциального преобразователя и проверить выполнение условия 
4. Рассчитать требуемую индуктивность по формуле 6.4, число витков катушки 10 и проверить их на вместимость в габаритные размеры катушки.
5. Определить мндуктивность катушки .
6. Рассчитать значения индуктивности L при перемещении сердечника от 0 до мм с дискретностью 1 мм. Данные расчета занести в таблицу 6.2.
7. Построить статическую характеристику преобразователя L=f(l)
(рисунок 6.5).
| Таблица 6.2 – расчетные данные | |||||||||
| Наименование параметра | Перемещение сердечника , мм
| ||||||||
| … | … | ||||||||
Параметр 
| |||||||||
| Индуктивность L, Гн | |||||||||
Погрешность от нелинейности  , мм , мм
|
L, Гн
0 1 2 3 4 5 6 7 8 9 10 l,мм
Рисунок 6.5 – Статическая характеристика L = f (l)
преобразователя
8. Рассчитать абсолютную максимальную чувствительность преобразователя и .
9. Рассчитать погрешность от нелинейности статической характеристики при перемещении сердечника от 0 до мм ( ). Расчетные значения m и занести в таблицу 6.2.
10. Построить зависимость  и проверить соответствие расчетной величины погрешности допускаемой
и проверить соответствие расчетной величины погрешности допускаемой  в заданном диапазоне измерений Д.
в заданном диапазоне измерений Д.
Содержание отчета
1. Цель занятия.
2. Основные теоретические положения.
3. Таблица исходных данных для расчета.
4. Эскиз магнитопровода преобразователя.
5. Расчет параметров ;  ; ; L = f (l); ; ; .
; ; L = f (l); ; ; .
6. Таблица 6.2 расчетных данных.
7. Графики зависимости L = f (l) и .
8. Выводы.
6.6. Контрольные вопросы
1. За счет чего повышается точность и чувствительность индуктивного преобразователя дифференциального типа?
2. Что такое индуктивность и добротность катушки?
3. Конструкция индуктивного преобразователя?
4. Как рассчитать относительную чувствительность преобразователя?
5. Как определить погрешность измерения от нелинейности характеристики преобразователя?
7. ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 6
РАСЧЕТ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ ПРИБОРОВ АКТИВНОГО КОНТРОЛЯ
Цель занятия
Изучение составляющих суммарной погрешности измерения и приобретение навыков расчета погрешности приборов активного контроля размеров деталей в процессе шлифования.
Теоретические положения
Общие сведения
В отличие от контроля универсальными средствами, автоматический контроль в большинстве случаев является дискретным. При автоматическом контроле обычно фиксируются предельные размеры контролируемых деталей или подаются какие-либо управляющие команды (например, команды на переключение станка с чернового на чистовое шлифование, с чистового шлифования на выхаживание, конец обработки).
Дискретность автоматического контроля обусловливает его точностные особенности. На точность средств активного контроля в большинстве случаев не оказывают влияние кинематические и технологические погрешности . Приборы активного контроля работают в более сложных условиях, чем средства автоматического послеоперационного контроля, связанных с наличием образованной пыли, влаги, стружки, вибраций узлов станка и контролируемых деталей, силовых и тепловых деформаций размерных технологических и метрологических цепей, поэтому методы расчета их погрешности отличаются друг от друга. Ниже приведена методика расчета приборов управляющих процессом шлифования деталей.
Последнее изменение этой страницы: 2016-08-11
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...