Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Регулировка и настройка упругих подвесов сейсмоприёмников
При сборке сейсмоприёмников производится контроль и настройка собственной частоты свободных колебаний упругих подвесов. Наряду с известными разработками [72,70,71,73] в данной диссертационной работе предлагается механический контроль собственной частоты по одной четвёртой части периода колебаний [74].
Настройку на собственную частоту и регулировку плоского положения в отечественной серии сейсмоприёмников СВ-5, СВ-10, СВ-20 производят регулировочными кольцами с выступами  , между которыми зажимаются упругие элементы ирисовой пружины. Вращением колец изменяется длина рабочей части упругих элементов и соответственно этому жесткость ирисовых пружин и частота упругого подвеса. Однако такая регулировка позволяет только увеличивать жёсткость и неудобна в исполнении.
, между которыми зажимаются упругие элементы ирисовой пружины. Вращением колец изменяется длина рабочей части упругих элементов и соответственно этому жесткость ирисовых пружин и частота упругого подвеса. Однако такая регулировка позволяет только увеличивать жёсткость и неудобна в исполнении.
В качестве технологичного универсального устройства настройки и регулировки упругого подвеса сейсмоприёмника можно предложить исполнение ирисовой пружины с тарельчатыми кольцами [75,76]. Посредством гайки на винтовой резьбе изменяется тарельчатость опорных колец с переходомих через плоское положение до отрицательной (противоположной) тарельчатости. При этом меняется жесткость С, несущее усилие  . достигается плоское состояние упругих элементов ирисовой пружины.
. достигается плоское состояние упругих элементов ирисовой пружины.
На рисунке 3.10 представлено устройство настройки жёсткости и несущего усилия упругого подвеса сейсмометра.
Упругий подвес содержит опорное тарельчатое 1 и подвесное 2кольца, соединённые упругими элементами 3 ирисовой пружины. К подвесному кольцу подвешивается инерционная масса 4 (катушка индуктивности). Опорное тарельчатое кольцо 1 внешней кромкой опираетсяна втулку магнитопровода 5, свою очередь упирающееся через вторую ирисовую пружину 6 на корпус 7 сейсмоприёмника. Гайка 8имеет возможность перемещаться по резьбе 9 в корпусе 7 и изменять тарельчатость ирисовой пружины. Вращением гайки 8 производится настройка сейсмоприёмникана заданную частоту.
Достоинством предлагаемого устройства настройки сейсмоприёмника является то, что изменять собственную частоту можно в полевых условиях. Для этого между гайкой 8 и опорным тарельчатым кольцом достаточно ввести герметизирующую мембрану.
На рисунке 3.11 даны нагрузочные характеристики ирисовых пружин в данном устройстве в процессе настройки сейсмоприёмика с  .
.
 |
Рисунок 3.10 - Устройство настройки жесткости и несущего усилия ирисовой пружины. 1 – тарельчатое опорное кольцо ирисовой пружины; 2 – подвесное опорное кольцо; 3 – упругий элемент; 4 – инерционная масса катушки индуктивности; 5 – втулка магнитопровода, 6 – нижняя ирисовая пружина, 7 – корпус сейсмоприемника, 8 – гайка, 9 - резьбовое соединение гайки с корпусом сейсмоприемника.
Масса катушки, приходящаясяна одну пружину 25г (угол наклона оси сейсмоприёмника к вертикали 45°). Потребная жёсткость 1,5 г/мм. Толщина ирисовой пружины 0,15мм, тарельчатость наружного опорного кольца 40°.
На рисунке 3.12 представлен график изменения жёсткости с ирисовой пружины в зависимости от угла поворота гайки, изменяющей тарельчатость опорного кольца.
На рисунке 3.13 приведен график изменения несущего усилия от угла поворота гайки  .
.

Рисунок 3.11 – Нагрузочные характеристики ирисовой пружины с тарельчатым опорным кольцом в процессе изменения тарельчатости посредством затяжки гайки.
Очевидно, что настройка этого трехкомпонентного сейсмоприёмникана собственную частоту  вполне обеспечивается.
вполне обеспечивается.
В заключении отметим, что измерение землетрясений с помощью подвеса инерционной массы на упругих элементах типа ирисовых пружин относительно корпуса прибора является самым точным и надёжным по сравнению с другими видами сеисмоприёмников. Сейсмоприёмники, основанные на использовании пьезоэлектрического эффекта [77,78,79], магнитного подвеса  и других физических эффектов уступают им из-за способности воспринимать электромагнитные возмущения вселенной, нестабильности параметров при температурных изменениях.
и других физических эффектов уступают им из-за способности воспринимать электромагнитные возмущения вселенной, нестабильности параметров при температурных изменениях.
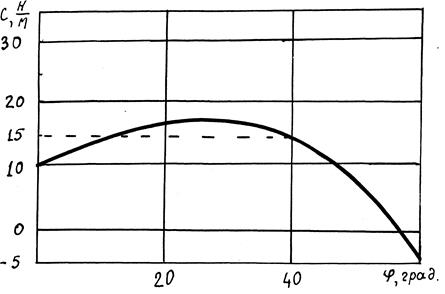 |
Рисунок 3.12 – График изменения жесткости С ирисовой пружины в зависимости от угла поворота j гайки, изменяющей тарельчатость
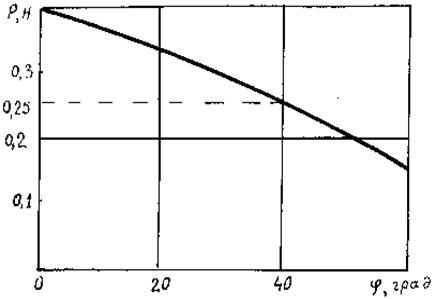
Рисунок 3.13 – График изменения несущего усилия Р и в зависимости от угла поворота j гайки, изменяющей терельчатость опорного кольца.
3.5 Расчет упругих подвесов транспортных средств на ирисовых пружинах
Проблему разработки подвески легковых автомобилем с собственной частотой 0,8-1,2 Гц [148] в работе [149,150] предложено решить посредством использования ирисовых пружин. Такие пружины, имеющие нелинейные нагрузочную характеристику, успешно используются в низкочастотных сейсмопримемниках с частотой свободных колебаний до 0,3 Гц. Повышение комфортности легкового автомобиля возможно по пути создания подвески с частотой, меньшей 0,8 Гц. Наиболее простой способ создания такой подвески возможенза счет использования ирисовых пружин. Однако, полученные расчетные формулы относились к трёхлучевым ирисовым пружинам [146] . Для увеличения диапазона рабочих перемещений рессор подвески автомобиля предлагается использовать двухлучевые ирисовые пружины.
Целью данного раздела является вывод расчетных формул нагрузочной характеристики, жесткости двухлучевых ирисовых пружин и определение геометрии рессор подвески легковых автомобилей на этих пружинах.
На рисунке 3.14 схематично показана конструкция двухлучевой ирисовой пружины, представляющая собой пластину с концентричными вырезами 1. Опорные кольца 2 и 3, одноиз которых крепится к корпусу подвешиваемого автомобиля, а другое к мосту с колесами, соединены упругими элементами (лучами) 4, определяющими жесткость упругого подвеса. Пружину заневоливают, для чего опорные кольца смещает по оси Х друг относительно друга и термообрабатывают. В исходном состоянии опорные кольца взаимно смещены на величину статического смещения Хс, в рабочем состоянии ирисовая пружина принимает плоское положение.
Ширину В упругого элемента задают в несколько раз больше её толщины h , что показано на радиальном сечении ирисовой пружины (рисунок 3.14 б). Средний радиус упругого элемента обозначен R, центральный угол луча - j0 .

Рисунок 3.14 – Двухлучевая ирисовая пружина – а, радиальный разрез луча ирисовой пружины – б

Рисунок 3.15. Нагрузочные характеристики ирисовых пружин:
1 – двухлучевая (В = 25 мм, h = 4,5 мм, R = 0,1 м, Хс = 58 мм);
2– двухлучевая (В = 40 мм, h = 4мм, R = 0,2 м, Хс = 58 мм);
3 – трехлучевая (В = 23мм, h = 3 мм, R = 0,1 м, Хс = 34 мм);
Зависимость нагрузки Рна ирисовую пружину от осевой деформации Х (рисунок 3.15) имеет нелинейный характер. При значении силы Ри, соответствующем перемещение Х = Хс в плоское положение у занедоленных ирисовых пружин резко снижается жёсткость С (С = dP/dx ). Это позволяет получать собственную частоту колебаний u= 1Гц, определяемую формулой: u=  (здесь m - масса упругого подвеса) при малых значениях статического смещения Хс. Таким образом снижаются габариты и вес рессор.
(здесь m - масса упругого подвеса) при малых значениях статического смещения Хс. Таким образом снижаются габариты и вес рессор. 
Для вывода формулы нагрузочной характеристики, использована подтвержденная экспериментами [146,147 ]модель работы ирисовой пружины (рисунки 2.2, 2.3, 2.4). Раскрытие статической неопределённости упругого бруса требует нахождения четырёх реакций: осевых сил Nz , Nу и моментов вокруг осей Mz ,Mу .
Приближённое аналитическое решение нелинейной нагрузочной характеристики Р = Р(Х) представлялось в виде (2.3)
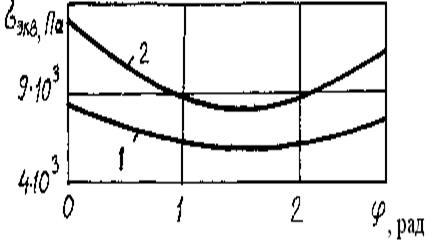
Рисунок 3.16– Распределение напряжений sэкв по длине луча ирисовой пружины: I-В =24мм, h =2.67 мм,R=0.1м, Хс =33,4мм; 2-В =25мм, h =3,5мм, R=0,1м, Хс =40мм.
окружность радиуса кривизны соответствующая приведению упругого элемента на промежуточного положения в плоское положение.
В дальнейшем для двухлучевых ирисовых пружин принято значение:
j0 = 2,967 рад.
Согласно построениям рисунков 2.3, 2.4 Остаются справедливыми формула (2.16) для радиальных перемещений Δ шарнира О и формулы (2.17) для дополнительной боковой силы Рд, обуславливающей нелинейность нагрузочной характеристики.
Решение систем канонических уравнений метода сил дало искомую функцию зависимости силы Р на ирисовую пружину (с учётом двух лучей) от осевого перемещения опорных колец друг относительно друга X.
 (3.1)
(3.1)
где Е - модуль упругости первого ряда; G=0,5 E / (1+m) ;
m - коэффициент Пуассона (m=0,3) ; крутильный момент инерции;
Jk =bBh3 и b малоизмеряемый коэффициент, зависящий от отношений В/h (b@0,31); максимальный изгибный момент инерции вокруг оси x (рисунок 3.14 б) Jm =hB3 /12.
При выводе формулы (4) учитывалась также и минимальная изгибная жесткость луча вокруг радиальной оси – EJ (J=Bh3/12). С учетом малоизменяемости коэффициента В было принято соотношение: GJk/EJ =1,45. В плоском положении ирисовой пружины при Х=Хс несущее усилие определяется
Р=(1,074GJk /R3)*Xc (3.2)
Жесткость равна
С=  (3.3)
(3.3)
На рисунке 3.15 представлены нагрузочные характеристики Р(Х) и данные геометрии ирисовых пружин, жесткость которых при массе автомобиля m=1т соответствует в плоском положении при Х=Хс частоте u=1 Гц (кривые 1,2). Жесткость каждой из четырех рессор ~ 9400  . Для сравнения дана нагрузочная характеристика трехлучевой ирисовой пружины (кривая 3). Очевидно, что диапазон перемещений
. Для сравнения дана нагрузочная характеристика трехлучевой ирисовой пружины (кривая 3). Очевидно, что диапазон перемещений  , соответствующих жесткости (требуемой), для предела изменения массы автомобиля D m=400 кг у трехлучевой ирисовой пружины меньше, чем у двухлучевой.
, соответствующих жесткости (требуемой), для предела изменения массы автомобиля D m=400 кг у трехлучевой ирисовой пружины меньше, чем у двухлучевой.
Система (3.1 – 3.3) позволяет определять геометрические размеры h,B,Xc двухлучевой ирисовой пружины в зависимости от заданного усилия Р, жесткости С (частоты u) и габаритных ограничений на радиус R. Модуль упругости для стали Е = 2*1011 Па. Решение сводится к отысканию корней алгебраического уравнения степени 8 относительно толщины листа пружины h.
Обязательным при выборе геометрии ирисовой пружины является выполнение условия прочности. В рабочем плоском положении на шарнир 0 луча ирисовой пружины воздействуют следующие факторы:
- боковая сила в направлении оси Z
 ; (3.4)
; (3.4)
- момент вокруг оси z
Mz =  ; (3.5)
; (3.5)
- сила в направлении оси Х  .
.
Эти силы вызывают следующие внутренние силовые факторы в сечениях луча:
Изгибающий момент вокруг оси максимальной жесткости x (рисунок 3.1)
 , (3.6)
, (3.6)
j - переменный угол, изменяющийся от 0 до j0 ;
- изгибающий момент вокруг оси минимальной жесткости
 ; (3.7)
; (3.7)
- крутящий момент
 (3.8)
(3.8)
Соответственно изгибные напряжения на боковой поверхности и плоскости ирисовой пружины выразятся:
 ; (3.9)
; (3.9)
 (3.10)
(3.10)
касательное напряжение определится
 , (3,11)
, (3,11)
Малоизменяемый коэффициент a»0,3
Эквивалентное напряжение по теории наибольших касательных напряжений
 . (3.14)
. (3.14)
Таблица 3.1 - Варианты геометрии ирисовых пружин, удовлетворяющих условий собственной частоты свободных колебаний легкового автомобиля u = 1 Гц
| №п/п | Число пружин в рессоре | Геометрические размеры, мм | Жесткость в пл. положении С, Н/м | Усилие в пл. положении Ри, Н | Максимальное напряжение sэкв , Па | |||
| B | h | R | Xc | |||||
| 2,67 | 33,4 | 8,3·108 | ||||||
| 4,00 | 58,0 | 5,4·108 | ||||||
| 4,00 | 30,0 | 1·109 | ||||||
| 4,00 | 45,0 | 16·108 | ||||||
| 3,50 | 40,0 | 13·108 | ||||||
| 2,67 | 33,4 | 8,3·108 | ||||||
| 4,00 | 58,0 | 5,4·108 |
Проблема отклонений параметров после операции заневоливания решается селективным подбором ирисовых пружин в рессоре с их числом более одной. Селективный подбор на ЭВМ таких пружин успешно применяются в массовом производстве сейсмоприемников. При этом
компенсируются отклонения несущих усилий в плоском положении, жесткости и смещений Хс.
Вопрос расширения диапазона допустимых перемещений в рабочем положении ирисовых пружин решается за счет применения двухрядных ирисовых пружин. Общая жесткость определяется законом последовательного соединения пружин каждого ряда. В результате участок перемещений на характеристике, где жесткость будет соответствовать требуемой частоте, увеличивается примерно в два раза.
Темой отдельного исследования должна стать устойчивость плоской формы изгиба упругих элементов – лучей ирисовой пружины.
Разработанная математическая модель двухлучевой ирисовой пружины и определенные варианты конструктивных размеров позволяют перейти к опытному изготовлению рессор подвески легкового автомобиля на пружинах этого типа.
Выводы по главе
Разработаны способы и устройства управления нелинейными параметрами упругих подвесов сейсмоприёмников на ирисовых пружинах. Новизна решений защищена восемью авторскими свидетельствами на изобретения. Получены расчетные формулы и определены варианты конструктивных размеров двухлучевых ирисовых пружин упругой подвески автомобилей.
Последнее изменение этой страницы: 2016-08-11
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...