Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Понятия о мёртвых положениях в кривошипно-ползунных механизмах и способы их прохождения
Рассмотрим случай, когда ведущим звеном является ползун. В этом случае происходит преобразование поступательного движения ползуна во вращательное движение ползуна (рис.3.15).

Рис.3.15
В таких механизмах, в момент, когда кривошип и шатун находятся на одной прямой, то вывести механизм из состояния неподвижности ползун не может.
Работу точки  можно найти по формуле:
можно найти по формуле:  .
.
На рис.3.16 угол между силой  и вектором скоростью точки
и вектором скоростью точки  составляет 90 градусов, следовательно
составляет 90 градусов, следовательно  , то есть как бы не была велика сила вывести механизм из этого положения она не может.
, то есть как бы не была велика сила вывести механизм из этого положения она не может.
Положения механизма, представленные на рис.3.16 и рис.3.17 из-за невозможности движения под действием силы  принято называть мёртвым положением.
принято называть мёртвым положением.


Рис.3.16 Рис.3.17
Существует два способа прохождения мёртвых положений: динамический и кинематический.
При динамическом методе на вал кривошипа одевается маховик.
Маховик– колесо со значительной массой, девяносто процентов которой сосредоточено в ободе этого колеса (рис.3.18).

Рис.3.18
Таким образом, маховик является аккумулятором энергии, получаемой от механизма, когда положение звеньев представляет наилучшее для работы состояние. Поскольку масса маховика значительна, то при прохождении мёртвого положения кинетическая энергия маховика проворачивает кривошип. Дальше действует сила ползуна.
Кинематический способ используется в тех случаях, когда большие массы маховиков недопустимы. Этот способ заключается в том, что кривошипы нескольких одинаковых механизмов жёстко связаны между собой образуя коленчатый вал. У этих кривошипов общая ось вращения, но расположены они под углом друг к другу, чтобы при мёртвом положении одного механизма, другой имел более благоприятное положение, и проворачивал коленчатый вал остальных механизмов. В этом случае также могут быть использованы маховики, но они будут иметь очень незначительную массу.
На рис.3.19 первый и третий механизмы находятся в мёртвых положениях, а второй и четвёртый механизмы находятся в наилучших положениях.

Рис.3.19
Пример 5.
Используем метод замкнутых векторных контуров (рис. 3.7).

Рис. 3.20.Замкнутый векторный контур кривошипно-ползунного механизма
Решение:
Рассмотрим замкнутый векторный контур OABCO. Соблюдая единообразие отсчёта углов, определяющих положение звеньев, составим векторное уравнение
 . (4)
. (4)
Спроектируем (4) на координатные оси Х и Y:
 (5) – (6)
(5) – (6)
Решение задачи о положениях
Определим функции положения ползуна  и шатуна
и шатуна  . Из (6) получаем
. Из (6) получаем  , откуда
, откуда  , из (5) получаем
, из (5) получаем  .
.
Решение задачи о скоростях
Определим аналог скорости ползуна  и шатуна
и шатуна  , для чего продифференцируем уравнение (5) и (6):
, для чего продифференцируем уравнение (5) и (6):
 (7) - (8)
(7) - (8)
Из (8) получаем аналог скорости шатуна
 ,
,
тогда угловая скорость шатуна  .
.
Из (7) получаем аналог скорости ползуна
 ,
,
тогда скорость ползуна вычисляется по формуле  .
.
Решение задачи об ускорениях
Определим аналоги ускорений шатуна  и ползуна
и ползуна  , для чего продифференцируем уравнения по
, для чего продифференцируем уравнения по  (7) и (8):
(7) и (8):
 (9) - (10)
(9) - (10)
Из (10) получим аналог ускорения шатуна  , тогда угловое ускорение шатуна можно вычислить по формуле
, тогда угловое ускорение шатуна можно вычислить по формуле
 .
.
Из (9) получим аналог ускорения ползуна  , тогда ускорение ползуна можно вычислить по формуле
, тогда ускорение ползуна можно вычислить по формуле
 .
.
Аналитическое исследование шарнирного четырёхзвенного механизма

Рис.3.21
При ведущем кривошипе рабочим ведомым звеном является чаще всего коромысло  (рис.3.21). Чтобы найти зависимость угла поворота ведомого звена от ведущего аналитическим способом пользуются следующей формулой (рис.3.22):
(рис.3.21). Чтобы найти зависимость угла поворота ведомого звена от ведущего аналитическим способом пользуются следующей формулой (рис.3.22):
 .
.

Рис.3.22
Аналитическое исследование кривошипно-кулисного механизма
Основным элементом кривошипно-кулисных механизмов является кулиса.
Кулиса – подвижная направляющая ползуна.
Кулисы бывают прямолинейные и изогнутые (рис.3.23). Конструктивно они бывают выполнены в виде стержней или рамных направляющих.

Рис.3.23
По принципу действия кривошипно-кулисные механизмы бывают следующих видов: механизмы с возвратно-поступательным вращением кулисы, механизмы с вращательным движением кулисы.
Рассмотрим механизм с поступательным вращением кулисы (рис.3.24).
1 – кривошип.
2 – ползун (камень).
3 – кулиса.
 ;
;
 ;
;  .
.

Рис.3.24
Назначением таково механизма является преобразование вращательного движения кривошипа в возвратно-поступательное движение кулисы.
Кулисный механизм с вращающейся головкой (рис.3.25).

Рис.3.25
1 – кривошип.
2 – ползун.
3 – качающаяся кулиса.
Этот механизм предназначен для преобразования вращающегося движения кривошипа в колебательное или вращательное движение кулисы (рис.3.26).

Рис.3.26
Зададим  .
.
 - угол поворота кривошипа при переходе кулисы из крайнего правого в крайнее левое положение.
- угол поворота кривошипа при переходе кулисы из крайнего правого в крайнее левое положение.
 - угол поворота кривошипа при переходе кулисы из крайнего левого в крайнее правое положение.
- угол поворота кривошипа при переходе кулисы из крайнего левого в крайнее правое положение.
Очевидно, что угол больше угла  . Так как , то
. Так как , то  , а
, а  ;
;
 или
или  . Так как
. Так как  , то
, то  . Это означает, что прохождения кулисы влево и вправо различны, то есть влево кулиса двигается медленнее, чем вправо.
. Это означает, что прохождения кулисы влево и вправо различны, то есть влево кулиса двигается медленнее, чем вправо.
Средняя скорость точки  :
:  ;
;  .
.
Путь  .
.
 ;
;  .
.
Найдём зависимость угла поворота кулисы от угла поворота кривошипа:
 ;
;  .
.
 ;
;
 ;
;
 ;
;  ;
;  ;
;  .
.
Выше были рассмотрены механизмы, у которых радиус кривошипа  был меньше чем межцентровое расстояние
был меньше чем межцентровое расстояние  . В этих механизмах кулиса совершала колебательные движения.
. В этих механизмах кулиса совершала колебательные движения.
Рассмотрим вариант, когда радиус кривошипа будет больше межцентрового расстояния (рис.3.27). В этом случае центр вращения кулисы – точка  будет находиться внутри кривошипной окружности, очерчиваемой шарниром кривошипа. Такие механизмы имеют вращающуюся кулису.
будет находиться внутри кривошипной окружности, очерчиваемой шарниром кривошипа. Такие механизмы имеют вращающуюся кулису.
Так как радиус  величина переменная, то угловая скорость кулисы
величина переменная, то угловая скорость кулисы  тоже будет величиной переменной. Верхнюю часть окружности кулиса проходит медленнее, чем нижнюю
тоже будет величиной переменной. Верхнюю часть окружности кулиса проходит медленнее, чем нижнюю

Рис.3.27
Вопросы для самопроверки
- Что называется "функцией положения" для звена или точки механизма?
- В чем различие между кинематическими и геометрическими характеристиками механизма?
- Какие функции называются кинематическими передаточными функциями механизма?
- Какие передаточные функции механизма называются главными, а какие вспомогательными?
- Перечислите методы геометро-кинематического исследования механизмов?
- Напишите формулы, устанавливающие связь между геометрическими и кинематическими характеристиками механизма?
- Изложите суть метода "проекций векторного контура"?
- Что называется циклом?
- Что называется "центроидой", как центроиды используются при кинематическом исследовании механизма?
- Как метод кинематических диаграмм применяется при кинематическом исследовании механизмов?
- Как применяется метод преобразования координат при решении прямой задачи о положении точки выходного звена?
- Как кинематические характеристики определяются экспериментально?
- Опишите последовательность кинематического анализа плоского механизма.
- Запишите уравнения планов скоростей и ускорений для любой структурной группы II класса, содержащей внутреннюю поступательную пару.
- Запишите уравнения планов скоростей и ускорений для любой структурной группы II класса, содержащей хотя бы одну внешнюю поступательную пару.
- Как определяют величину и направление ускорения Кориолиса?
- В каких случаях при построении планов скоростей и ускорений применяют метод подобия?
- По какому признаку можно установить, является ли равномерным (или неравномерным) относительное движение звеньев, образующих поступательную пару?
- Цель кинематического анализа механизмов.
Ответ: изучить движение звеньев механизма без учета сил, вызывающих это движение.
- Как называются графики, построенные по полученным значениям кинематических величин?
Ответ: кинематические диаграммы.
- Назовите численные значения масштаба.
Ответ: 1, 2, 2.5, 4, 5.
- Как называется чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению ускорениям различных точек звеньев механизма в данный момент?
Ответ: план ускорений.
- Единица измерения масштаба скорости.
Ответ: м сек-1/мм.
- Напишите формулу для определения численного значения нормальной составляющей ускорения любой точки кривошипа.
Ответ:  .
.
- Как определить направления угловой скорости звена?
Ответ: угловая скорость и вектор относительной скорости направлены в одну сторону.
- Скорость самолета 2500 км/час. Сколько метров самолет пролетает за одну секунду?
Ответ: 694,4 м/сек.
- Скорость автомобиля 80 км/час. Какой путь автомобиль пройдет за одну секунду?
Ответ: 22 м.
- Задачи кинематического анализа механизмов.
Ответ: определение перемещений звеньев и траекторий, описываемых точками звеньев; определение скоростей отдельных точек звеньев и угловых скоростей звеньев; определение ускорений отдельных точек звеньев и угловых ускорений звеньев.
- Понятие масштаба в ТММ.
Ответ: Масштаб это отношение действительной величины к отрезку в мм, который изображает эту величину на чертеже.
- Напишите формулу для определения численного значения скорости любой точки кривошипа.
Ответ:  .
.
- Чем задается положение ведущего звена, если оно входит в поступательную пару?
Ответ: функцией перемещения s=s(t).
- Как определить направление углового ускорения звена?
Ответ: угловое ускорение направлено в сторону тангенциальной составляющей относительного ускорения.
- С какой целью определяют ускорения точек звеньев механизма?
Ответ: например, для определения силы инерции.
- Для каких целей строят кинематические диаграммы?
Ответ: для кинематического исследования механизма.
- Единица измерения масштаба времени.
Ответ: сек/мм.
- Чем определяется положение ведущего звена, если оно входит во вращательную пару со стойкой?
Ответ: функцией угла поворота  .
.
- С какой целью определяют перемещения (траектории) точек звеньев механизма?
Ответ: для построения кинематических диаграмм, а также для выбора размеров корпусных деталей при проектировании механизма.
- Напишите формулу для определения угловой скорости  (рад/сек), если известна частота вращения
(рад/сек), если известна частота вращения  (об/мин).
(об/мин).
Ответ:  .
.
- Единица измерения масштаба длины.
Ответ: м/мм.
- Напишите формулу для определения численного значения тангенциальной составляющей ускорения любой точки кривошипа.
Ответ:  .
.
- С какой целью определяют скорости точек звеньев механизма?
Ответ: например, для выбора типа смазки.
- Единица измерения масштаба угла поворота.
Ответ: град/мм или рад/мм.
- Что такое кинематические диаграммы?
Ответ: графики, построенные по полученным значениям кинематических величин.
- Что такое план скоростей?
Ответ: чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек звеньев механизма в данный момент.
- Что такое план ускорений?
Ответ: чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению ускорениям различных точек звеньев механизма в данный момент.
Задачи для самостоятельного решения
Задача 1
Для некоторой структурной группы имеется уравнение плана скоростей
 .
.
Написать для этой группы:
1) уравнение плана ускорений;
2) формулы для вычисления угловой скорости и углового ускорения звена 3.
Задача 2
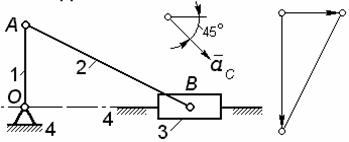
Кривошип OA механизма вращается равномерно; обозначить полюс и все векторы плана ускорений. Считая все постоянные размеры звеньев заданными, нанести на этот план вектор  ускорения точки C.
ускорения точки C.

Задача 3
Кривошип OA механизма вращается равномерно; обозначить полюс и все векторы плана ускорений. Считая все постоянные размеры звеньев заданными, указать на прямой AB звена 2 такую точку C, ускорение которой направлено, как показано на рисунке (написать формулу, по которой вычисляется положение этой точки на звене). Нанести соответствующую точку на план ускорений.
Задача 4
На плане скоростей кривошипно-кулисного механизма отметить полюс и векторы скоростей всех обозначенных на схеме точек. Найти для изображенного положения механизма точную величину отношения (  ), если OA = OB.
), если OA = OB.

Задача 5
Для структурной группы имеется уравнение плана ускорений
 .
.
Написать для этой группы:
1) уравнение плана скоростей; формулы для расчета угловой скорости  и углового ускорения
и углового ускорения  ;
;
2) формулы для расчета нормального и кориолисова ускорений.
Задача 6
В рассматриваемом положении механизма звенья 1 и 3 вертикальны, звено 2 горизонтально. Звено 1 вращается равномерно с угловой скоростью  =10 рад / с. Длины звеньев: AB = BC = 2OA. Найти величину и направление углового ускорения звена 2.
=10 рад / с. Длины звеньев: AB = BC = 2OA. Найти величину и направление углового ускорения звена 2.

Задача 7
В рассматриваемом положении механизма звенья 1 и 3 вертикальны, звено 2 горизонтально. Звено 1 вращается равномерно с угловой скоростью =10 рад/с. Длины звеньев: AB = BC = 2OA. Найти величину и направление углового ускорения звена 2.

Задача 8
Определить скорость и ускорение точки B звена 2; указать направления обоих векторов для заданного положения механизма.
Исходные данные: OA=0,20 м; AB=0,10 м;  =5 рад/с; кривошип OA в текущем положении вертикален.
=5 рад/с; кривошип OA в текущем положении вертикален.

Задача 9
Для механизма крестово-кулисной муфты определить скорость и ускорение точки B звена 3; указать направления обоих векторов. В текущем положении механизма звено 1 вертикально и вращается равномерно с угловой скоростью = 10 рад/с, звено 3 отклонено от вертикали на угол  =300. Размер АВ = 0,3 м.
=300. Размер АВ = 0,3 м.

Задача 10
В текущем положении механизма угол  ползун 1 движется равномерно. Размеры звеньев: длина кривошипа
ползун 1 движется равномерно. Размеры звеньев: длина кривошипа  , длина шатуна
, длина шатуна  . Определить точное соотношение угловых ускорений звеньев
. Определить точное соотношение угловых ускорений звеньев  в указанном положении.
в указанном положении.

Задача 11(см. рисунок к задаче 10)
Установить величину отношения угловых ускорений звеньев 2 и 3  при равномерном движении ползуна 1 в изображенном положении кривошипно-ползунного механизма (т.е. при угле ). Соотношение длин звеньев:
при равномерном движении ползуна 1 в изображенном положении кривошипно-ползунного механизма (т.е. при угле ). Соотношение длин звеньев:  .
.
Задача 12(см. рисунок к задаче 10)
Доказать, что при равномерном движении ползуна 1 в изображенном положении механизма (т.е. при угле ) угловые ускорения звеньев 2 и 3 одинаковы по величине и направлению.
Задача 13
Кривошип 1 вращается с угловым ускорением  =1 рад/с2; при каком значении его угловой скорости ползун 3 в рассматриваемом положении механизма (т.е. при угле
=1 рад/с2; при каком значении его угловой скорости ползун 3 в рассматриваемом положении механизма (т.е. при угле  ) будет двигаться равномерно? Соотношение длин звеньев:
) будет двигаться равномерно? Соотношение длин звеньев:  .
.

Задача 14
Для кинематической цепи известны: размеры звеньев BC и h; положение, скорость  и ускорение
и ускорение  точки A; положение (угол a), угловая скорость и угловое ускорение звена 2; положение, скорость
точки A; положение (угол a), угловая скорость и угловое ускорение звена 2; положение, скорость  и ускорение
и ускорение  точки B. Описать порядок построения положения точки С; написать уравнения планов скоростей и ускорений, в результате решения которых будут найдены скорость и ускорение точки С, а также угловая скорость и угловое ускорение звеньев 3 и 4.
точки B. Описать порядок построения положения точки С; написать уравнения планов скоростей и ускорений, в результате решения которых будут найдены скорость и ускорение точки С, а также угловая скорость и угловое ускорение звеньев 3 и 4.

Задача 15
Для кинематической цепи известны: размеры звеньев BC и h; положение, скорость и ускорение точки A; положение, скорость и ускорение точки B. Написать совокупность векторных уравнений и скалярных зависимостей для определения скорости и ускорения точки С.

Задача 16
Взаимное расположение шарниров O и C таково, что при  =450 звено AB горизонтально и OA
=450 звено AB горизонтально и OA  CB. Установить соотношения угловых скоростей звеньев (
CB. Установить соотношения угловых скоростей звеньев (  ) и (
) и (  ) для указанного положения механизма. Размеры звеньев: OA=AB=CB.
) для указанного положения механизма. Размеры звеньев: OA=AB=CB.

Задача 17
Размеры звеньев механизма: OA=AB=CB; взаимное расположение шарниров O и C таково, что при =450 звено AB горизонтально и OA CB. Установить соотношения угловых скоростей звеньев ( ) и ( ) для указанного положения механизма.

Задача 18
Написать все уравнения, необходимые для нахождения скорости и ускорения точки C звена 2 методом планов; при написании векторных уравнений указать, в какой мере известны те или иные векторы, входящие в него. Геометрические параметры звеньев считать заданными, а положения, скорости и ускорения точек A и B – известными для текущего момента времени.

Задача 19
Для секансного механизма определить скорость точки A в положении, определяемом углом  =450. Размер
=450. Размер  ; входное звено вращается с угловой скоростью
; входное звено вращается с угловой скоростью  .
.

Задача 20(см. рисунок к задаче 19)
Для секансного механизма определить скорость скольжения в поступательной паре (1-2) в положении, определяемом углом =450. Размер ; входное звено вращается с угловой скоростью .
Задача 21
Для синусного механизма определить аналитически скорость и ускорение точки B в положении, определяемом углом =600. Размеры  ,
,  ; входное звено вращается с угловой скоростью .
; входное звено вращается с угловой скоростью .

Задача 22
Для синусного механизма определить аналитически скорость и ускорение в относительном движении ползуна 2 по звену 3 в положении, определяемом углом =600. Размер ; входное звено вращается с угловой скоростью .

Задача 23
Для тангенсного механизма найти аналитически скорость точки A в положении, определяемом углом =450. Размер  ; кулиса 1 вращается с угловой скоростью .
; кулиса 1 вращается с угловой скоростью .

Задача 24(см. рисунок к задаче 23)
Для тангенсного механизма найти аналитически скорость скольжения в поступательной паре (1-2) в положении, определяемом углом =450. Размер h=0,20 м; кулиса 1 вращается с постоянной угловой скоростью .
Задача 25
Рычаг длиной OA=0.5 м вращается ускоренно; скорость его конца  = 2 м/с, вектор ускорения направлен под углом
= 2 м/с, вектор ускорения направлен под углом  к вектору скорости. Определить угловое ускорение e рычага.
к вектору скорости. Определить угловое ускорение e рычага.

Задача 26(см. рисунок к задаче 25)
Рычаг длиной OA=0.5 м вращается ускоренно; скорость его конца = 2 м/с, вектор ускорения направлен под углом  к вектору скорости. Определить величину ускорения
к вектору скорости. Определить величину ускорения  .
.
e-mail: [email protected]
Башкирский государственный аграрный университет
Кафедра теоретической и прикладной механики
450001, г.Уфа, ул.50 лет Октября, д.34, корпус №3, ком.279/3






  
|

Последнее изменение этой страницы: 2016-06-09
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...