Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Разработка функциональной схемы ЭП
Курсовое проектирование
по дисциплине:Системы управления приводами
РАБОТУ ВЫПОЛНИЛИ:
СТУДЕНТЫ ГРУППЫ в6311
Рыжковский И.
Степанов А.
Мешков Д.
Чистяков И.
______________________________ _________________________
подпись, дата инициалы, фамилии
Санкт-Петербург
Введение
Существует большое разнообразие автоматических систем, выполняющих те или иные функции по управлению различными физическими процессами во всех областях техники. В этих системах сочетаются весьма разнообразные по конструкции механические, электрические и другие устройства, составляющие сложный комплекс взаимодействующих друг с другом звеньев.
Каждая автоматическая система состоит из целого ряда блоков или звеньев, различно соединенных между собой. Динамика процесса преобразования сигнала в звене описывается некоторым уравнением (или экспериментально снятой характеристикой), связывающим выходную переменную с входной. Совокупность уравнений и характеристик всех звеньев описывает динамику процессов в управления или регулирования во всей системе в целом. Существуют различные характеристики звеньев: статические, переходные, частотные и другие.
В настоящее время диапазон задач, решаемых с помощью различных радиолокационных станций и комплексов очень широк. Различные системы радиолокации используются как в военной отрасли, так и в астрономии, медицине, автомобилестроении, метеорологии, в охранных системах, на аэродромах.
При расчете и проектировании систем автоматизированного электропривода большое значение имеет правильная оценка возможности обеспечения приводом заданных динамических и точностных характеристик.
Если требуемые скорости и ускорения превышают те, которые способен обеспечить привод, то попытки получения удовлетворительно работающего привода введением каких-либо корректирующих устройств будут безуспешны.
Для обеспечения требуемого качества работы, приводохватывается обратной связью.Исходя из заданной точности работы электропривода, применяются корректирующие устройства, которые могутрасполагаться как в прямой, так и цепи местной обратной связи.
Большая часть процессов, выполняемая на самолетах, связана с необходимостью обеспечить механическое перемещение рабочих органов исполнительных механизмов. Движение исполнительному механизму сообщается электродвигателем. Наиболее совершенный тип двигателя электрический. Для согласования механических характеристик электродвигателя и исполнительного механизма, перемещающих рабочие органы, используются механические передачи (редукторы). [16]
Электроприводом (ЭП) называется электромеханическое устройство, состоящее из электродвигателя, элементом управления его работой и передаточного механизма, предназначенного для приведения в движение исполнительного механизма. Основными достоинствами ЭП по сравнению с другими типами приводов являются:
– высокий КПД электродвигателя;
– большая перегрузочная способность;
– возможность управления частотой вращения электродвигателя в широких пределах;
– высокая надежность;
– удобство подведения электрической энергии к исполнительному механизму (осуществляется по кабелям);
– возможность оптимизации выбора типов и назначений электродвигателей в широких пределах;
– удобство и простота эксплуатации.
В ходе работы планируется спроектировать привод, удовлетворяющий условиям ТЗ. Необходимо разработать функциональную схему, а так же выбрать и рассчитать все функционально необходимые элементы привода. Для достижения заданной точности работы привода необходимо произвести анализ динамических свойств и на основе полученных данных выбрать оптимальную структуру корректирующего звена. Кроме того, надо проанализировать влияние случайных ошибок на проектируемый электропривод.
В проекте нужноразработать конструкцию механического узла привода произвести экономический расчет полной себестоимости привода, а так же учесть требования правил норм к охране труда при производстве данного изделия.
Техническое задание
В качестве исходных данных для проектирования используются следующие сведения:
Исходные данные:
1. привод антенны;
2. параметры нагрузки:
– момент статический активный Мст 20 Нм;
– момент сухого трения Мтм 4 Нм;
– момент инерции нагрузки Jн 4 кг*м2;
– максимальный угол поворота αm 6.28 рад
– максимальная угловая скорость Ωm 1,8 рад;
– максимальное ускорение нагрузки εm 0,6 рад;
3. требования к качеству работы:
– допустимая скоростная ошибка Хск 10 мин;
– допустимая гармоническая ошибка Хд 10 мин;
– показатель колебательности М 1,4;
4. тип передачи редуктора – зубчатый;
5. тип усилителя мощности – транзисторный;
Сведение об электрическом источнике питания:
27В постоянного тока
220В переменного тока частотой 50Гц.
1. Анализ технического задания
Содержание курсового проекта является техническое проектирование замкнутого электропривода (ЭП), относящегося к классу следящих систем. Рассматриваются все этапы проектирования привода антенны с заданными показателями качества. Привод антенны относится к группе приводов автоматического сопровождения и предназначен для слежения за объектами, перемещающими в пространстве. Разрабатываемый привод может быть использован в системах бортовой навигации, бортовых радиопеленгаторов или в других системах. Требования к динамике данной группы приводов определяются законом движения цепи и условиями наилучшей фильтрации случайной составляющей входного сигнала (помехи). Требования к нагрузке определяются условиями размещения и параметрами управляемых устройств.
Существенные особенности возникают при установке систем сопровождения на подвижном основании, так как при этом, кроме слежения за целью, появляется необходимость парировать с высокой степенью точности колебания основания, носящие случайный характер, как правило, приводы этой группы должны иметь высокую динамическую точность. [1]
Выбор элементов электропривода
Любой ЭП, вне зависимости от назначения, предполагает наличие элементов, обязательных для его функционирования. Такими элементами являются: измеритель рассогласования ИР, усилитель У, исполнительный двигатель ИД, передаточный механизм ПМ. Все эти элементы функционально связаны, поэтому их правильный выбор является важнейшим этапом проектирования. [1]
электропривод чертеж узел динамический
Исполнительный двигатель
Двигатель в ЭП является главным исполнительным элементом, преобразующим напряжение в перемещение РО. От того, насколько быстро ИД развивает обороты, преодолевая сопротивление нагрузки, зависит, в конечном счете, быстродействие ЭП. От способности двигателя развивать момент на валу при малейших напряжениях управления зависит плавность работы ЭП и точность.
Значения скоростей и ускорений, которые может развивать двигатель, ограничены по величине. Если требуемые скорости и ускорения привода выше тех, которые способны обеспечить двигатель, то попытки получения удовлетворительно работающего привода введением каких-либо корректирующих устройств будут безуспешными.
Мощность, которую двигатель может рассеивать, не нагреваясь выше допустимой температуры, также ограничена по величине. Если мощность, теряемая в двигателе в процессе работы в заданном режиме, выше допустимой, то необходимо использовать дополнительные меры охлаждения, сокращать время работы или применять другой более мощный двигатель.
Установка двигателей излишней мощности приводит к неоправданному возрастанию габаритов и веса привода, ухудшению энергетических показателей и тому подобное. Применение двигателей заниженной мощности позадачному закону иливлечет за собойперегрев двигателя свыше допустимой температуры и, следовательно,резкое снижениесрока службы привода.
Для следящих приводов, работающих обычно в режиме движения с переменной скоростью, расчет мощности двигателя не может дать сразу однозначного решения, ибо величина требуемой мощности зависит от момента инерции якоря двигателя и передаточного числа редуктора, которые на первом этапе расчета не известны. В связи с этим выбор мощности ИД осуществляется методом последовательных приближений, то есть, сначала двигатель выбирается на основании приближенных соотношений, а затем пригодность ориентировочно выбранного двигателя проверяется детальным анализом динамических возможностей и энергетических характеристик привода. [5]
В качестве основного будем рассматривать длительный режим работы. Нагрев двигателя будем считать обусловленным среднеквадратическим моментом. Виды нагрузки сведены к типовым: постоянному статическому моменту, сухому и жидкому трению, шарнирному моменту и моменту, обусловленному инерционными характеристиками объекта управления, редуктора и самого двигателя.
Выбор электродвигателя по моменту нагрузки производиться по формуле
 , (3.1)
, (3.1)
где данные параметры находятся в техническом задании, перечислим их:
Мтм – момент сухого трения 4 Нм; Ώм - максимальная угловая скорость 1.8 радиана; Мст – активный статически момент 20 Нм; Jн – момент инерции нагрузки ротора 4 кг м2; εм - наибольшее угловое ускорение 0,6 радиана; тогда

По исходным данным с учетом параметров нагрузки, определим мощность Ртр, которая требуется для преодоления некоторого усредненного среднеквадратического момента, характеризующего тепловой режим ИД. Ртр определяется по формуле:
 (3.2)
(3.2)

где Кр – коэффициент запаса, равный 1.3;
По имеющимся в каталоге двигателям выбираем ИД, удовлетворяющий следующему условию;
 , (3.3)
, (3.3)
где P* – мощность выбранного двигателя 90Вт;

Выбираем двигатель типа МИГ – 90А.
Таблица 3.1. Технические данные двигателя
| Un, В | Pn, Вт | In, A | Mn, Н*м | Ωn, с‾¹ | J, кг*м² 10-5 | Мтр, Н*м | Мп, Н*м | m, кг |
| 4.5 | 0.286 | 0.057 | 1.82 | 5.9 |
Таблица 3.2. Габаритные и установочные размеры двигателя
| d1, мм | d2, мм | d3, мм | d4, мм | d5, мм | d6, мм | - |
| M5 | - | |||||
| l1, мм | l2, мм | l3, мм | l4, мм | l5, мм | l6, мм | l7, мм |
После этого двигатель проверяется по его моментным характеристикам.
Одним из основных условий пригодности двигателя является его проверка по максимальному результирующему моменту. Условием пригодности является выполнение неравенства: проверим пусковой момент по формуле
 , (3.4)
, (3.4)
где  – передаточное отношение редуктора, тогда получается
– передаточное отношение редуктора, тогда получается

1.82*168≥25.7
Из (3.4) очевидно, что проверка двигателя по пусковому моменту выполнена.
Проверка по пусковому моменту прошла успешно, но это недостаточно для окончательного решенияо пригодности выбранного двигателя, поскольку его средняя нагрузка по току в течениевсего времени работы,обусловленная изменчивостью момента нагрузки, может превысить номинальное значение. Приступим к проверки по средне квадратичному моменту (проверка по теплу).
 , (3.5)
, (3.5)
где М*n – номинальный момент двигателя заданный в паспорте 0,286 Нм; таким образом


Получаем следующие соотношение по формуле (3.5)
 ,
,
Очевидно, что оно удовлетворяет требованием по теплу.
Измеритель рассогласования
Измеритель рассогласования является информационным звеном ЭП, предназначенным для измерения g(t) и y(t), преобразования измеренных величин в электрический сигнал Ux, пропорциональный разности g(t) – y(t) = x(t).
Элементной базой для построения ИР являются первичные измерительные преобразователи (ПИП). В курсовом проекте используется вид ПИП: потенциометрические (ПМ). Принцип построения ИР по каскадной схеме. Привод с неограниченным углом поворота задающего вала, представлен на рисунке:

Рисунок 3.4 Принципиальная схема каскадного ИР на потенциометрических ПИП
Допустимая ошибка ИР определяется в виде:


Так как выполняется условие  , то выбираем ПИП (ПТП‑5КI) удовлетворяющий требованиям ЭП по точности
, то выбираем ПИП (ПТП‑5КI) удовлетворяющий требованиям ЭП по точности
Если выдерживается соотношение Rд < Rп < Rу, где Rу – входное сопротивление предварительного усилителя, то коэффициент передачи ИР определяется в виде

Таблица 3.3. Технические данные потенциометрических ПИП
| Обозначение | φ, град | Мтр*10-2, Нм | δRj | Pp, Вт | m, кг |
| ПТП -5КI | 0.645 | δR30 | 0.115 |
Обозначим  – сопротивление датчика;
– сопротивление датчика;  – сопротивление приемника;
– сопротивление приемника;  – входное сопротивление сумматора,
– входное сопротивление сумматора,  – угол активной зоны потенциометра.
– угол активной зоны потенциометра.
Статический расчет
Статический расчёт выполняется для установившегося режима работы привода и используется для определения требуемого из соображений точности общего коэффициента передачи (усиления) усилительно-преобразовательного устройства (УПУ), поскольку все остальные элементы привода – ИР, ИД, ПМ уже определены. При этом следует учитывать те основные режимы, на которые ориентирован привод. [1]
Для ПА тактовыми являются режим слежения с максимальной скоростью и режим слежения при гармоническом задающем воздействии. Гармоническое воздействие будет использовано далее для построения логарифмических характеристик привода с заданными свойствами. Поэтому следует воспользоваться режимом слежения с постоянной скоростью. При этом коэффициент передачи привода определяют с помощью выражения:

где β – жесткость механической характеристики ИД, находиться по формуле
 ,
,
где МП - пусковой момент двигателя и МN-номинальный момент, заданный в паспорте.
Для каскадной схемы ВТ, изображенный на рисунке 3.5, коэффициент передачи ИР имеет вид:

(4.2)
Затем определяется значение коэффициента усиления УПУ.

(4.3)
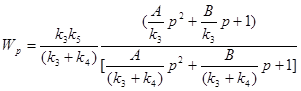
Динамический расчет
Синтез корректирующих звеньев
Назначением корректирующих звеньев (КЗ) является обеспечение желаемых динамических и точностных показателей ЭП. Поэтому фактически с ПУ и УМ является регулятором привода, реализующим закон управления, обеспечивающий заданное качество, в линейном ЭП желаемые показатели полностью определяются видом ЖЛАХ, поэтому вид и параметры КЗ могут быть определены по взаимному расположению ЖЛАХ и РЛАХ разомкнутого ЭП. [1] Электропривод можно представить как произведение располагаемой передаточной функции ЭП Wр(р) и передаточной функции некоторого КЗ Wк(р):
Wж (р) = Wр(р) * Wкз (р),
откуда следует
Lк = Lж – Lр, (5.12)
где  -ЛАХ корректирующего звена;
-ЛАХ корректирующего звена;
 -ЛАХ желаемого звена;
-ЛАХ желаемого звена;
 -ЛАХ располагаемого звена.
-ЛАХ располагаемого звена.
Lk=66–56=10Дб
Запишем новые значения постоянных времени Т, определенных по рисунку 5.7 ЖЛАХ:
Теперь представим общий вид передаточной функции, заметим, что в ней присутствует новый коэффициент:

(5.13)
С учетом всех посчитанных значений передаточная функция КЗ будет выглядеть так:
 (5.14)
(5.14)

Рисунок 5.10. Структурная схема скорректированной системы

Рисунок 5.11 Переходный процесс скорректированной системы

Рисунок 5.12 ЛАХ корректирующего звена
Такой способ коррекции дал желаемые результаты. Они удовлетворяют требованиям, заданным в техническом задании показателя M=1.4, наш процесс не превышает заданного значения.
Расчет принципиальной схемы
Корректирующее устройство реализуется на двух последовательных схемах. Передаточные функции первого и второго КЗ имеют вид: 5.16, 5.17 соответственно.
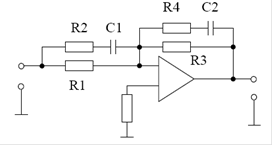
Рисунок 5.10 Первое корректирующие звено
Передаточная функция первого КЗ выглядит так:

 (5.16)
(5.16)
Передаточная функция этого звена определяется в виде:

Далее приведены расчетные соотношения для данного звена:


Таким образом,
Передаточная функция второго КЗ выглядит так:

 (5.17)
(5.17)
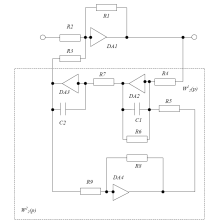
Рисунок 5.11 Второе корректирующие звено
Передаточная функция этого звена определяется в виде:
Далее приведены расчетные соотношения для данного звена:

Таким образом,
Заключение
В результате проделанной работы был спроектирован замкнутый электропривод, относящийся к классу следящих систем, предназначенный для слежения за объектами, перемещающимися в пространстве. Были выбраны и спроектированы системы. Была рассмотрена совокупность уравнений и характеристик всех звеньев, описывающих динамику процессов управления во всей системе в целом. С помощью частотных методов была построена передаточная функция привода.
В разработанном проекте рассмотрен вариант последовательной коррекции (прямая цепь ЭП), и, непосредственно, выбрано корректирующее звено.
Для окончательной проверки свойств электропривода, построенного на выбранных элементах, на ЭВМ был произведен расчет и анализ переходных процессов в системе. В разработанном проекте расчет переходных процессов производился в программах MATLAB и MATHCAD.
Для достижения заданных в проекте показателей качества регулирования была спроектирована конструкция механического узла, обеспечивающая требуемое функционирование системы.
Также были рассмотрены конструкторско-технологические вопросы, в которых подробно были изложены технические условия на электропривод антенны. Была произведена оценка технологичности конструкции, в результате которой был рассчитан комплексный показатель технологичности, который входит в диапазон его нормативных значений.
Также были разработаны меры защиты при сборке и настойке привода для рабочих предприятий.
Результаты расчетов показали, что разработанный электропривод имеетдостаточно низкую себестоимость. Полученная себестоимость значительно ниже по сравнению с себестоимостью привода аналогичного разработанному в данном проекте. Это позволяет снизить цену электропривода на рынке и быть достойным конкурентом не только в финансовом плане, но и в плане технических свойств и качеств, предъявляемых к приводу заказчиком.
Главное предназначение спроектированного электропривода – обеспечение высокой точности выходной величины (угла поворота) при слежении за объектом, перемещающимся в пространстве.
Библиографический список
1. Автоматизированный электропривод. Методическая разработка по дипломному проектированию. ЛИАП 1993 г.
2. Аникин А.Д., Павлов А.В. Оценка технологичности конструкции и разработка технологического процесса сборки. Методические указания. ЛИАП 1993 г.
3. Бесекерский В.А., Попов В.П. Теория систем автоматического регулирования. Изд-во «Наука»., 1972 г.
4. Баюков А.В. Полупроводниковые приборы: диоды, тиристоры, опто-электонные приборы. Справочник. «Энергоатомиздат» 1985 г.
5. Герман О.Г., Земляков Н.Д., Сусленникова Е.Ю. Автоматизированные приводы летательных аппаратов. Выбор электродвигателя. Учебное пособие/ЛИАП. Л., 1991 г.
6. Герман О.Г., Телицин Э.Л. Расчет электронных устройств систем автоматики. Учебное пособие/ГААП. СПб., 1993 г.
7. Единая система конструкторской документации. Общие правила выполнения чертежей. Москва, 1970 г.
8. Земляков Н.Д., Полякова Т.Г., Шишлаков В.Ф. Рассчеты точности автоматических систем при случайных воздействиях. Методические указания к дипломному проектированию. ГААП 1997 г.
9. Земляков Н.Д., Сусленникова Е.Ю. Первичные измерительные преобразователи следящего электропривода. Потенциометры и тахогенераторы. Методические указания к дипломному проектированию. ЛИАП 1992 г.
10. Исследование интегральных ОУ и устройств с их использованием. СПб ГААП 1993 г.
11. Казаченко В.И., Колобашкина Т.В. Безопасность жизнедеятельности. Промышленная и экологическая безопасность. Методические указания к дипломному проектированию. СПб ГУАП 2001 г.
12. Краткий справочник конструктора РЭА. Под ред. Варламова Р.Г., «Советское радио». Москва. 1985 г.
13. Левин И.Я. Справочник конструктора точных приборов. Москва. 1962 г.
14. Лукичев А.Н., Лукичева Л.С. Технология авиаприборостроения. Учебное пособие. ЛИАП 1986 г.
15. Нестеренко Б.К. Интегральные операционные усилители. Справочное пособие по применению. «Энергоиздат» 1982 г.
16. Пугачев B.C., Казаков И.Е., Евланов
Л.Г. Основы статической теории автоматических систем. «Машиностроение» 1974 г.
17. Сироткин В.Б., Трофимова Л.А. Определение эффективности инвестиций. Методические указания к выполнению дипломного проекта. СШГУАП1997Г.
18. Справочник по автоматизированному электроприводу под редакцией Елисеева В.А., Шинянского А.В. «Энергоатомиздат» 1983 г.
19. Усилитель устройства, корректирующие элементы и устройства. Под редакцией Солодовникова В.В. «Машиностроение» 1975 г.
Размещено на Allbest.ru
Курсовое проектирование
по дисциплине:Системы управления приводами
РАБОТУ ВЫПОЛНИЛИ:
СТУДЕНТЫ ГРУППЫ в6311
Рыжковский И.
Степанов А.
Мешков Д.
Чистяков И.
______________________________ _________________________
подпись, дата инициалы, фамилии
Санкт-Петербург
Введение
Существует большое разнообразие автоматических систем, выполняющих те или иные функции по управлению различными физическими процессами во всех областях техники. В этих системах сочетаются весьма разнообразные по конструкции механические, электрические и другие устройства, составляющие сложный комплекс взаимодействующих друг с другом звеньев.
Каждая автоматическая система состоит из целого ряда блоков или звеньев, различно соединенных между собой. Динамика процесса преобразования сигнала в звене описывается некоторым уравнением (или экспериментально снятой характеристикой), связывающим выходную переменную с входной. Совокупность уравнений и характеристик всех звеньев описывает динамику процессов в управления или регулирования во всей системе в целом. Существуют различные характеристики звеньев: статические, переходные, частотные и другие.
В настоящее время диапазон задач, решаемых с помощью различных радиолокационных станций и комплексов очень широк. Различные системы радиолокации используются как в военной отрасли, так и в астрономии, медицине, автомобилестроении, метеорологии, в охранных системах, на аэродромах.
При расчете и проектировании систем автоматизированного электропривода большое значение имеет правильная оценка возможности обеспечения приводом заданных динамических и точностных характеристик.
Если требуемые скорости и ускорения превышают те, которые способен обеспечить привод, то попытки получения удовлетворительно работающего привода введением каких-либо корректирующих устройств будут безуспешны.
Для обеспечения требуемого качества работы, приводохватывается обратной связью.Исходя из заданной точности работы электропривода, применяются корректирующие устройства, которые могутрасполагаться как в прямой, так и цепи местной обратной связи.
Большая часть процессов, выполняемая на самолетах, связана с необходимостью обеспечить механическое перемещение рабочих органов исполнительных механизмов. Движение исполнительному механизму сообщается электродвигателем. Наиболее совершенный тип двигателя электрический. Для согласования механических характеристик электродвигателя и исполнительного механизма, перемещающих рабочие органы, используются механические передачи (редукторы). [16]
Электроприводом (ЭП) называется электромеханическое устройство, состоящее из электродвигателя, элементом управления его работой и передаточного механизма, предназначенного для приведения в движение исполнительного механизма. Основными достоинствами ЭП по сравнению с другими типами приводов являются:
– высокий КПД электродвигателя;
– большая перегрузочная способность;
– возможность управления частотой вращения электродвигателя в широких пределах;
– высокая надежность;
– удобство подведения электрической энергии к исполнительному механизму (осуществляется по кабелям);
– возможность оптимизации выбора типов и назначений электродвигателей в широких пределах;
– удобство и простота эксплуатации.
В ходе работы планируется спроектировать привод, удовлетворяющий условиям ТЗ. Необходимо разработать функциональную схему, а так же выбрать и рассчитать все функционально необходимые элементы привода. Для достижения заданной точности работы привода необходимо произвести анализ динамических свойств и на основе полученных данных выбрать оптимальную структуру корректирующего звена. Кроме того, надо проанализировать влияние случайных ошибок на проектируемый электропривод.
В проекте нужноразработать конструкцию механического узла привода произвести экономический расчет полной себестоимости привода, а так же учесть требования правил норм к охране труда при производстве данного изделия.
Техническое задание
В качестве исходных данных для проектирования используются следующие сведения:
Исходные данные:
1. привод антенны;
2. параметры нагрузки:
– момент статический активный Мст 20 Нм;
– момент сухого трения Мтм 4 Нм;
– момент инерции нагрузки Jн 4 кг*м2;
– максимальный угол поворота αm 6.28 рад
– максимальная угловая скорость Ωm 1,8 рад;
– максимальное ускорение нагрузки εm 0,6 рад;
3. требования к качеству работы:
– допустимая скоростная ошибка Хск 10 мин;
– допустимая гармоническая ошибка Хд 10 мин;
– показатель колебательности М 1,4;
4. тип передачи редуктора – зубчатый;
5. тип усилителя мощности – транзисторный;
Сведение об электрическом источнике питания:
27В постоянного тока
220В переменного тока частотой 50Гц.
1. Анализ технического задания
Содержание курсового проекта является техническое проектирование замкнутого электропривода (ЭП), относящегося к классу следящих систем. Рассматриваются все этапы проектирования привода антенны с заданными показателями качества. Привод антенны относится к группе приводов автоматического сопровождения и предназначен для слежения за объектами, перемещающими в пространстве. Разрабатываемый привод может быть использован в системах бортовой навигации, бортовых радиопеленгаторов или в других системах. Требования к динамике данной группы приводов определяются законом движения цепи и условиями наилучшей фильтрации случайной составляющей входного сигнала (помехи). Требования к нагрузке определяются условиями размещения и параметрами управляемых устройств.
Существенные особенности возникают при установке систем сопровождения на подвижном основании, так как при этом, кроме слежения за целью, появляется необходимость парировать с высокой степенью точности колебания основания, носящие случайный характер, как правило, приводы этой группы должны иметь высокую динамическую точность. [1]
Разработка функциональной схемы ЭП
Электропривод относится к замкнутой электромеханической системе, функционирование которой вполне определяется обобщённой функциональной схемой, представленной на рисунке 2.1.
На рисунке 2.1 приняты следующие обозначения: ЗУ – задающее устройство; ИР – измеритель рассогласования; УУ – устройство управления; ИМ – исполнительный механизм; РО – рабочий орган; ПУ – предварительный усилитель; ПК – последовательное корректирующее устройство; СУ – суммирующее устройство; КОС – корректирующее устройство в цепи местной обратной связи; УМ – усилитель мощности; ИД – исполнительный двигатель; ПМ – передаточный механизм (редуктор).
Задающее устройство вырабатывает управляющее (задающее) воздействие q(t), с которым регулируемая величина y(t) на выходе ИМ должна находиться в требуемой зависимости
q(t) – y(t) = x(t)  xдоп.
xдоп.
Исполнительный механизм состоит из электродвигателя и редуктора, соединяющего вал электродвигателя с рабочим органом и согласующего их кинематические параметры.
Устройство управления служит для усиления сигнала рассогласования и преобразование его в регулирующее воздействие, подаваемое на исполнительный механизм.
Необходимое по техническому заданию качество регулирования обеспечивается корректирующими устройствами. В показанной на рисунке 2.1 схеме, применены последовательное корректирующее устройство и корректирующее устройство в цепи местной обратной связи. Однако в большинстве случаев оказывается достаточным применить корректирующее устройство какого-либо одного типа.
В приводе типа ПА в качестве q(t) выступает угол поворота, определяемый счетно-решающего устройствами ПА.
Необходимое по техническому заданию качество регулирования обеспечивается корректирующими устройствами.
К так называемой неизменяемой части привода относятся ИР, ИД, ПМ, РО, имея в виду их конструктивную определенность. К изменяемой части привода относятся УУ, как устройство, параметры которого определяются при синтезе закона управления и могут быть изменены при изменении условий функционирования. Однако это положение достаточно условной, но это не значит, что при необходимости нельзя заменить двигатель или другой элемент неизменяемой части. Неизменяемая часть привода при синтезе воспринимается как заданная. [1]
Выбор элементов электропривода
Любой ЭП, вне зависимости от назначения, предполагает наличие элементов, обязательных для его функционирования. Такими элементами являются: измеритель рассогласования ИР, усилитель У, исполнительный двигатель ИД, передаточный механизм ПМ. Все эти элементы функционально связаны, поэтому их правильный выбор является важнейшим этапом проектирования. [1]
электропривод чертеж узел динамический
Исполнительный двигатель
Двигатель в ЭП является главным исполнительным элементом, преобразующим напряжение в перемещение РО. От того, насколько быстро ИД развивает обороты, преодолевая сопротивление нагрузки, зависит, в конечном счете, быстродействие ЭП. От способности двигателя развивать момент на валу при малейших напряжениях управления зависит плавность работы ЭП и точность.
Значения скоростей и ускорений, которые может развивать двигатель, ограничены по величине. Если требуемые скорости и ускорения привода выше тех, которые способны обеспечить двигатель, то попытки получения удовлетворительно работающего привода введением каких-либо корректирующих устройств будут безуспешными.
Мощность, которую двигатель может рассеивать, не нагреваясь выше допустимой температуры, также ограничена по величине. Если мощность, теряемая в двигателе в процессе работы в заданном режиме, выше допустимой, то необходимо использовать дополнительные меры охлаждения, сокращать время работы или применять другой более мощный двигатель.
Установка двигателей излишней мощности приводит к неоправданному возрастанию габаритов и веса привода, ухудшению энергетических показателей и тому подобное. Применение двигателей заниженной мощности позадачному закону иливлечет за собойперегрев двигателя свыше допустимой температуры и, следовательно,резкое снижениесрока службы привода.
Для следящих приводов, работающих обычно в режиме движения с переменной скоростью, расчет мощности двигателя не может дать сразу однозначного решения, ибо величина требуемой мощности зависит от момента инерции якоря двигателя и передаточного числа редуктора, которые на первом этапе расчета не известны. В связи с этим выбор мощности ИД осуществляется методом последовательных приближений, то есть, сначала двигатель выбирается на основании приближенных соотношений, а затем пригодность ориентировочно выбранного двигателя проверяется детальным анализом динамических возможностей и энергетических характеристик привода. [5]
В качестве основного будем рассматривать длительный режим работы. Нагрев двигателя будем считать обусловленным среднеквадратическим моментом. Виды нагрузки сведены к типовым: постоянному статическому моменту, сухому и жидкому трению, шарнирному моменту и моменту, обусловленному инерционными характеристиками объекта управления, редуктора и самого двигателя.
Выбор электродвигателя по моменту нагрузки производиться по формуле
, (3.1)
где данные параметры находятся в техническом задании, перечислим их:<
Последнее изменение этой страницы: 2016-07-22
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...