Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Построение желаемой логарифмической характеристики
Желаемые логарифмические характеристики (ЖЛАХ) является одной из форм описания динамических свойств привода, отвечающих тем показателям, которые к приводу предъявляются. Такая характеристика, будучи отражением желаемых показателей, может быть сопоставлена с располагаемой (РЛАХ), соответствующей приводу, построенному на выбранных элементах. В результате сопоставления может быть решён вопрос о средствах, которыми можно изменить конфигурацию РЛАХ в направлении её приближения к ЖЛАХ, то есть о корректирующих устройствах. [1]
Учитывая, что проектируемые приводы относятся к типу минимально фазовых систем, при построении ЖЛЧХ можно ограничиться только амплитудными характеристиками.
Желаемая ЛАХ строится на основании информации о точности и качестве переходного процесса привода. Точность привода в виде допустимых ошибок используется для формирования ЖЛАХ в низкочастотной области, а показатели качества переходного процесса в виде G, tп или М – для формирования ЖЛАХ в области частоты среза (на средних частотах). В высокочастотной области конфигурацию ЖЛАХ желательно оставить такой, какой она является в ЛАХ располагаемой, построенной по сведениям о выбранных элементах.
Запретная область в низкочастотной части ЖЛАХ строится по контрольной точке Ак на основании выражения для частоты ωк эквивалентного гармонического воздействия αэ(t) и ординаты L(ωк).
ωк = εm/Ωm (5.5)
ωк = 0.6/1.8 = 0.33 с-1
Поскольку привод находиться под воздействием статического момента, положение контрольной точки определяется по выражению:
L(ωк) = 20lgαm/xд, (5.6)
где αm = Ω²m/εm
αm = 1.8²/0.6= 5.4 рад
Тогда L(ωк) = 20lg (5.4*60*57/10)=66.2 Дб
Предельное нижнее положение ЖЛАХ в низкочастотной области – на 3дБ выше границы запретной зоны. Поэтому ЖЛАХ в области низких частот фактически повторяет конфигурацию границы запретной области.
Точка пересечения правой границы запретной области с осью называется базовой частотой и определяется по выражению:
 (5.7)
(5.7)
Частоту среза ЖЛАХ определяется с учетом показателя колебательности М и базовой частоты ω0 по формуле:

 (5.8)
(5.8)
Проводим подстановку и получаем:

Наличие сухого трения накладывает определенные ограничения на вторую сопрягающую частоту ω2, которая может быть определена в соответствии с формулой:
 (5.9)
(5.9)

Неравенство выполняется, можно приступить к нахождению третий сопрягающей частоты:
 (5.10)
(5.10)
Но используем частоты приведенные ниже

Высокочастотную часть ЖЛАХ сохраняют с тем же наклоном как у РЛАХ и они равны ω4= 400 рад, ω5=800 рад.
Желаемая ЛАХ изображена на рисунке 5.7, и её передаточная функция будет такой
 (5.11)
(5.11)
Где
Постоянные времени – точки перегиба ЖЛАХ
Коэффициент ЖЛАХ – находится через контрольную точку, опусканием прямой с наклоном в 20 дБ на ось времени.
Кж=255
Подставляя, получаем:


Рисунок 5.5 Структурная схема желаемой системы

Рисунок 5.6 Переходный процесс желаемой системы

Рисунок 5.7 ЛАХ желаемой системы
Синтез автоматического регулирования методам логарифмических амплитудных характеристик является в настоящее время одним из самых удобных и наглядных. Наиболее трудным моментом при расчете методом логарифмических амплитудных характеристик является установление связи показателей качества с параметрами желаемой ЛАХ, что объясняется сравнительно сложной зависимостью между переходной характеристикой.
Синтез корректирующих звеньев
Назначением корректирующих звеньев (КЗ) является обеспечение желаемых динамических и точностных показателей ЭП. Поэтому фактически с ПУ и УМ является регулятором привода, реализующим закон управления, обеспечивающий заданное качество, в линейном ЭП желаемые показатели полностью определяются видом ЖЛАХ, поэтому вид и параметры КЗ могут быть определены по взаимному расположению ЖЛАХ и РЛАХ разомкнутого ЭП. [1] Электропривод можно представить как произведение располагаемой передаточной функции ЭП Wр(р) и передаточной функции некоторого КЗ Wк(р):
Wж (р) = Wр(р) * Wкз (р),
откуда следует
Lк = Lж – Lр, (5.12)
где  -ЛАХ корректирующего звена;
-ЛАХ корректирующего звена;
 -ЛАХ желаемого звена;
-ЛАХ желаемого звена;
 -ЛАХ располагаемого звена.
-ЛАХ располагаемого звена.
Lk=66–56=10Дб
Запишем новые значения постоянных времени Т, определенных по рисунку 5.7 ЖЛАХ:
Теперь представим общий вид передаточной функции, заметим, что в ней присутствует новый коэффициент:

(5.13)
С учетом всех посчитанных значений передаточная функция КЗ будет выглядеть так:
 (5.14)
(5.14)

Рисунок 5.10. Структурная схема скорректированной системы

Рисунок 5.11 Переходный процесс скорректированной системы

Рисунок 5.12 ЛАХ корректирующего звена
Такой способ коррекции дал желаемые результаты. Они удовлетворяют требованиям, заданным в техническом задании показателя M=1.4, наш процесс не превышает заданного значения.
Расчет принципиальной схемы
Корректирующее устройство реализуется на двух последовательных схемах. Передаточные функции первого и второго КЗ имеют вид: 5.16, 5.17 соответственно.
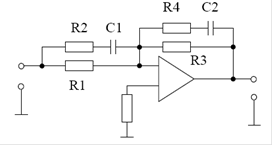
Рисунок 5.10 Первое корректирующие звено
Передаточная функция первого КЗ выглядит так:

 (5.16)
(5.16)
Передаточная функция этого звена определяется в виде:

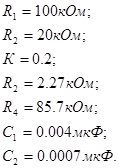
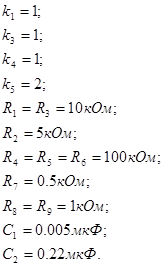
Далее приведены расчетные соотношения для данного звена:

Таким образом,
Передаточная функция второго КЗ выглядит так:

 (5.17)
(5.17)
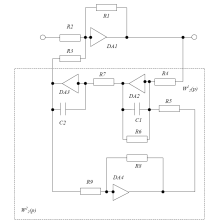
Рисунок 5.11 Второе корректирующие звено
Передаточная функция этого звена определяется в виде:
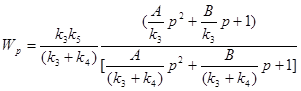
Далее приведены расчетные соотношения для данного звена:

Таким образом,
Последнее изменение этой страницы: 2016-07-22
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...