Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Момент силы относительно точки и оси
С Т А Т И К А
РАСЧЕТНЫЕ И КУРСОВЫЕ РАБОТЫ
Санкт-Петербург
2007
Составители: Г.Т. Алдошин, д-р техн. наук, проф.;
Ж.Н. Андреева, канд. техн. наук, доц.
УДК 531.2 (075.8)
С79
 |
Р е ц е н з е н т : канд. техн. наук, доц. БГТУ О.Г.Агошков
Утверждено
редакционно-издательским
советом университета
©Составители, 2007
© БГТУ,2007
ПРЕДИСЛОВИЕ
Расчетные и курсовые работы по теоретической механике для студентов инженерно-технических специальностей Балтийского государственного технического университета “ВОЕНМЕХ” составлены в соответствии с новыми образовательными стандартами и типовыми программами по дисциплине “Теоретическая механика” министерства образования и науки Российской Федерации.
Среди физико-математических дисциплин, составляющих теоретическую базу общетехнических и специальных дисциплин, теоретической механике принадлежит ведущая роль. Она выполняет роль своеобразного моста между физикой и математикой, с одной стороны, и прикладными инженерными дисциплинами, с другой; здесь впервые происходит знакомство с постановкой и практическим решением инженерных задач: на основе физических законов формулируются физико–механические модели изучаемых явлений и затем методами математического анализа с привлечением современной вычислительной техники их решение доводится до числовых результатов. Однако, на практических занятиях, предусматриваемых программами, осуществляется лишь начальный этап обучения, на котором рассматриваются упрощенные модели, что может создать иллюзию того, что в инженерной практике встречаются лишь такие модели, с «удобными» размерами, «хорошими» углами и которые можно решить методами несложного «ручного» счета. В то же время известно, что решение даже простой технической задачи связано с составлением сложных аналитических зависимостей, выводом разного рода уравнений и проведения громоздких расчетов.
Типовые расчетные работы позволяют в определенной мере не только сгладить указанное противоречие, но и учесть тенденции изменения научного поиска, связанного с появлением ЭВМ и пакетов прикладных программ. Задачи, которые еще несколько десятков лет назад были практически недоступны для решения, сейчас легко решаются на ПК. Расширился не только круг задач, но возросли возможности для их детального исследования и познания их закономерностей. Основная работа при этом заключается в составлении уравнений, а рутинная вычислительная работа перекладывается на ПК.
Система предлагаемых заданий ставит своей целью проверку текущих знаний, получение информации о глубине и прочности усвоения программного материала, активизации познавательной деятельности и выработки у обучающихся навыков решения достаточно сложных задач при помощи известных математических и вычислительных алгоритмов и программ. В предлагаемых работах не все разделы программы отражены в равной мере, поэтому они не заменяют традиционных практических занятий, все эти формы текущего контроля знаний должны дополнять друг друга. При составлении заданий широко использован опыт кафедры теоретической механики и баллистики БГТУ, а также некоторый схемный и программный материал, подготовленный на кафедре Е.Ф. Зеновой, Т.И. Кузнецовой, Г.Н. Пученкиным, Б.Э. Кэртом, Э.Н. Мишиной.
ОБЩИЕ ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ РАСЧЕТНОЙ И КУРСОВОЙ РАБОТЫ
В основе работ лежит индивидуальный подход для обеспечения активных форм самостоятельной работы. Вариант выполняемой работы указывается преподавателем.
Текстовым документом расчетной и курсовой работы является пояснительная записка, которая оформляется на одной стороне листа писчей бумаги формата А4. Пояснительную записку допускается выполнять как рукописным способом, так и с применением печатных и графических устройств вывода на ЭВМ в формате А4, на котором должны быть оставлены поля: слева - 2,5, справа -10, сверху и снизу - 2 см. В последнем случае текст записки набирается в редакторе Word c использованием гарнитуры шрифта Times New Roman Cyr размером 12, межстрочный интервал -1,5. Текст выравнивается по ширине, с отступом первой строки 1,25см. Таблицы набираются кеглем - 9; формулы - в редакторе формул шрифтом - основной -11, крупный индекс -8, мелкий индекс -7, крупный символ -14, мелкий символ -9. Стили ¾ Математический - для латинских и греческих букв, Текст - для русских. Рисунки - либо отсканированные, либо построенные в графическом редакторе с расширением 300 dpi в форматах: TIF, BMP, JPEG, Другие форматы не используются. Текст, связанный с рисунком (надписи, подписи), набирается шрифтом - не крупнее 11-го и не мельче 7-го.
При выполнении работы необходимо записать текст задания, сделать относящийся к работе рисунок варианта схемы конструкции, указать исходные данные. На рисунке должны быть указаны оси координат, их обозначения и все векторы, которые встречаются в ходе выполнения работы. При оформлении расчетной работы следует руководствоваться примером решения этого типа задач, приведенного в данном пособии.
Листы с выполненной работой нумеруются, скрепляются вместе с титульным листом, оформленным по прилагаемому образцу.
Оформленная согласно указанным требованиям расчетная или курсовая работа сдается на проверку преподавателю в сроки, указанные в плане-графике кафедры. Защита работ проводится в форме собеседования с преподавателем, в процессе которого проверяются способности студента правильно отвечать на теоретические вопросы, пояснять решение задач, выявляются пробелы в знаниях для принятия своевременных мер по их устранению.
КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ
Механика изучает движение и взаимодействие материальных тел в пространстве и с течением времени. Количественной мерой взаимодействия тел является сила. Раздел механики, изучающий правила эквивалентного преобразования и условия равновесия системы сил, называется статикой. Силой в механикеназываютмеру механического взаимодействия материальных тел. Сила является векторной величиной, характеризуемой числовым значением, линией и направлением действия, точкой приложения. Обычно полагают, что точкой приложения является элементарная частица тела, к которой непосредственно приложена сила. Такие силы называют сосредоточенными. В действительности, часто приходится иметь дело с силами, приложенными к части объема тела, его поверхности или какой-либо линии. Такие силы называют распределенными. В соответствии с основной теоремой статики произвольную распределенную систему сил всегда можно привести к более простой эквивалентной системе, состоящей из одной силы и одной пары. Правила такого преобразования приведены в пособии [Г.Т. Алдошин. СТАТИКА. Уч.пособие. СПб, БГТУ, 1999. 91с].
Силы, действующие на систему, разделяются на внешние ¾ силы, действующие на данную систему со стороны тел, не входящих в рассматриваемую систему, и внутренние ¾ силы взаимодействия между телами рассматриваемой системы.
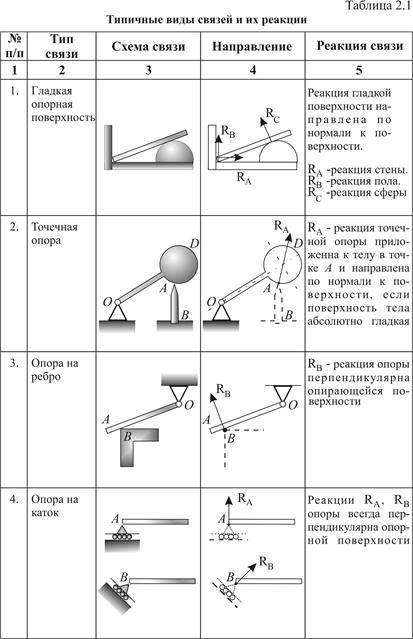
Тело называется свободным, если его перемещение в пространстве ничем не ограничено. В противном случае тело называется несвободным. Материальные тела, ограничивающие свободу движения рассматриваемого тела, называются связями. Силы, с которыми связи действуют на тело, называются реакциями связей. Значение реакции связи заранее неизвестно и зависит от вида связи, от других приложенных к телу сил и должно определяться в результате решения конкретной задачи. Реакция связи направлена в сторону, противоположную тому направлению, по которому связь не дает перемещаться телу. Согласно аксиоме освобождаемости от связей несвободное тело можно рассматривать как свободное, если отбросить связи, заменив их действие силами реакций. Тогда при перечислении всех сил, приложенных к телу, в их число необходимо включать и силы реакций. На несвободное тело всегда действуют два вида сил: заданные силы, независящие от связей, которые называют активными силами, и силы реакций. Некоторые типичные виды связей и реакции, соответствующие этим связям, приведены в табл.2.1. Составляющие реакций  рекомендуется направлять в сторону положительного направления осей, а момент пары
рекомендуется направлять в сторону положительного направления осей, а момент пары  -считать положительным (вращение против хода часовой стрелки в правой системе координат). Если в процессе решения задачи для ,
-считать положительным (вращение против хода часовой стрелки в правой системе координат). Если в процессе решения задачи для ,  получены отрицательные значения, то это означает, что составляющие и направление вращения пары в действительности противоположны предполагаемым, но на рисунке схемы менять ничего не надо.
получены отрицательные значения, то это означает, что составляющие и направление вращения пары в действительности противоположны предполагаемым, но на рисунке схемы менять ничего не надо.


Момент силы относительно оси
Рассмотрим тело, которое может вращаться вокруг неподвижной оси у, и к нему в точке А приложена сила  (рис.2.3). Через произвольную точку оси проведем плоскость, перпендикулярную оси, а саму ось возьмем за одну из осей декартовой системы координат с началом в точке О. Разложим силу
(рис.2.3). Через произвольную точку оси проведем плоскость, перпендикулярную оси, а саму ось возьмем за одну из осей декартовой системы координат с началом в точке О. Разложим силу
Рис.2.3 на две составляющие:  , параллельную оси Oy, и
, параллельную оси Oy, и  , равную проекции силы
, равную проекции силы  на плоскость xОz. Составляющая не может повернуть тело вокруг оси Oy , а может лишь сдвигать его вдоль оси. Следовательно, вращающийэффект силы
на плоскость xОz. Составляющая не может повернуть тело вокруг оси Oy , а может лишь сдвигать его вдоль оси. Следовательно, вращающийэффект силы  будет создаваться только ее проекцией на плоскость , перпендикулярную оси Oy, т.е. моментом проекции этой силы. Моментом силы относительно произвольной оси Oy называется момент проекции силы на плоскость , перпендикулярную оси Oy, взятый относительно точки пересечения плоскости с осью.
будет создаваться только ее проекцией на плоскость , перпендикулярную оси Oy, т.е. моментом проекции этой силы. Моментом силы относительно произвольной оси Oy называется момент проекции силы на плоскость , перпендикулярную оси Oy, взятый относительно точки пересечения плоскости с осью.
Обозначим момент силы относительно оси Оy -  , радиус-вектор проекции точки А на плоскость -
, радиус-вектор проекции точки А на плоскость -  . Тогда
. Тогда
=  ,
,
а его величина 
Момент силы относительно оси считается положительным, если с положительного направления оси Oy, поворот тела, вызываемый моментом, представляется происходящим против хода часовой стрелки.
Из полученной формулы следует, что момент силы относительно оси равен нулю в двух случаях: если сила параллельна оси, т.е. когда проекция силы на плоскость равна нулю, и когда плечо силы h равна нулю, т.е. когда линия действия силы пересекает ось. В обоих этих случаях сила и ось лежат в одной плоскости.
Равновесие одного тела
Задача на равновесие одного тела под действием плоской произвольной системы сил решается в следующей последовательности:
- выделить тело, равновесие которого рассматривается;
- указать заданные активные силы, приложенные к телу;
- в случае несвободного тела мысленно освобождаем тело от связей, заменив их действием реакций связей (направление которых выбирается исходя из вида связи (табл.2.1);
- составить расчетную схему, указав на ней (на рисунке схемы конструкции) все приложенные к телу активные силы, моменты и реакции связей, распределенные нагрузки замещаются при этом сосредоточенными силами с указанием точек их приложения;
- определить число неизвестных реакций и число возможных уравнений равновесия и установить, является ли рассматриваемая задача статически определимой;
- выбрать систему координат и составить уравнения равновесия;
- решить систему уравнений и определить все неизвестные величины;
- провести качественный анализ полученного решения и его соответствия механическим условиям задачи.
Задачу на равновесие плоской системы сил, приложенной к одному телу, рассматриваем для двух случаев:
Расчетная работа №1. Равновесие тела, которое может опрокидываться;
Расчетная работа №2. Равновесие плоской произвольно расположенной системы сил.
РАСЧЕТНАЯ РАБОТА №1
Исходные данные к расчетной работе № 2
| № схе- мы | Линейные размеры, м | Угол, ° град | G | P | 
| M | |||
| a | b=l | c | a | кН | кН/м | кН×м | |||
| - | |||||||||
| - | |||||||||
| - | |||||||||
| - | |||||||||
| - | |||||||||
| - | |||||||||
| - | |||||||||
Окончание табл. 3.2
| № схе- мы | Линейные размеры, м | Угол, ° град | G | P |
| M | |||
| a | b=l | c | a | кН | кН/м | кН×м | |||
| - | 8 /2 4 /2 6/3 | ||||||||
| 6/2 6/3 8/4 | |||||||||
| - | 8/4 6/2 6/3 | ||||||||
| - | |||||||||
| - | |||||||||
| - | |||||||||
Пример 3.2выполнения расчетной работы№ 2. Равновесие плоской произвольно расположенной системы сил. Схема балки показана на рис.3.4.
 Дано: Горизонтальная балка АВ нагружена системой сил: сосредоточенной силой Р = 4 кН, моментом М = 5 кН×м пары сил и равномерно распределенной нагрузкой интенсивности q = 2 кН/ м; размеры а = 2м; b=Зм; d=2 м;
Дано: Горизонтальная балка АВ нагружена системой сил: сосредоточенной силой Р = 4 кН, моментом М = 5 кН×м пары сил и равномерно распределенной нагрузкой интенсивности q = 2 кН/ м; размеры а = 2м; b=Зм; d=2 м;
углы α =60°; ß =30˚.
Определить: реакции опор  и
и  , пренебрегая весом балки АВ.
, пренебрегая весом балки АВ.
Решение. Рассмотрим равновесие балки АВ под действием заданных активных сил. Для составления уравнений равновесия необходимо равномерно распределенную по закону прямоугольника нагрузку на заданном участке балки b заменить равнодействующей, равной численно площади заштрихованной фигуры-прямоугольника Q=q·b=2·3=6 кН, и приложенной в центре тяжести этой фигуры.
Освобождаем систему от связей, направив реакцию  в катковой опоре (подвижном шарнире В) перпендикулярно плоскости опоры, а реакцию внеподвижном шарнире А заменяем двумя составляющими -
в катковой опоре (подвижном шарнире В) перпендикулярно плоскости опоры, а реакцию внеподвижном шарнире А заменяем двумя составляющими -  .
.
Поставленную задачу можно записать коротко следующим образом:
AB  ,
,  .
.
Так как число неизвестных реакций (  ,
,  ,
,  ) равно трем, то рассматриваемая задача является статически определимой.
) равно трем, то рассматриваемая задача является статически определимой.
Составим уравнения равновесия плоской системы сил, приложенной к балке АВ:
1.  P×cos a- × sin b + = 0;
P×cos a- × sin b + = 0;  ;
;
2.  - P×sin a-Q +
- P×sin a-Q +  + × cos b = 0; ;
+ × cos b = 0; ;
3.  -P× a× sin a - Q×
-P× a× sin a - Q×  - M + ×
- M + ×  × cos b = 0.
× cos b = 0.
Из (3):

Из (1): = - P×cos a+ × sin b = - 4 × 0,5+5,4 × 0,5 = 0,7 kH.
Bp (2): = P×sin a+ Q - × cos b = 4×  + 6 - 5.4 = 4,8 kH.
+ 6 - 5.4 = 4,8 kH.
Для проверки полученных значений опорных реакций можно составить дополнительное уравнение равновесия:
 - ×7 + P×5×sin a + Q ×3,5 - M = 0;
- ×7 + P×5×sin a + Q ×3,5 - M = 0;
 0=0, значит, реакции определены верно.
0=0, значит, реакции определены верно.
Ответ: = 0.7 кН; = 4.8 кН; =5.4 кН.
Равновесие сочлененных тел
Схемы конструкций плоских систем сочлененных тел представлены на рис.3.5, линейные размеры и действующие на конструкцию нагрузки - в табл. 3.3.
Определитьсилывзаимодействия,возникающие в промежуточном шарнире B, и усилия вподдерживающихсоставную конструкцию опорах, пренебрегая весами балок.
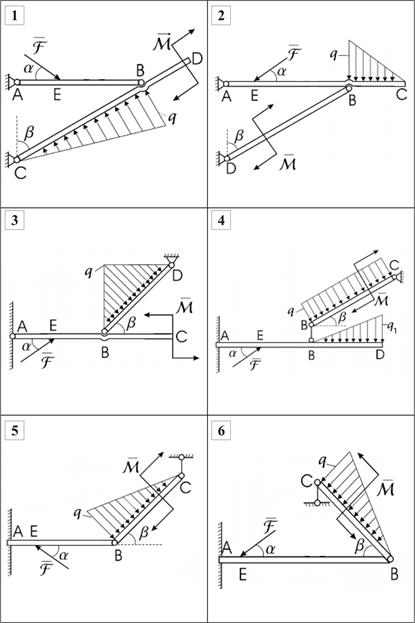
Рис. 3.5. Схемы конструкций сочлененных тел к расчетной работе № 3

Рис. 3.5 (продолжение)

Рис. 3.5 (окончание)
Т а б л и ц а 3.3
Исходные данные к расчетной работе № 3
| № схемы | Линейные размеры (м) | кН/м | F, кН | M, кН м | Углы, 
| ||||||
| АЕ | AB | BC | CD | BD | q1 | q | 
| 
| |||
| 2,0 1,5 2,5 | 7,0 8,0 8,0 | – – – | 9,0 | – – – | – – – | 1,2 1,0 0,8 | |||||
| 1,0 1,2 1,4 | – – – | 2,0 2,4 2,2 | – – – | 1,4 1,2 1,2 | – – – | 1,6 1,4 1,2 | |||||
| 1,6 1,4 1,2 | 8,0 8,0 8,0 | – – – | – – – | 2,4 2,6 2,2 | – – – | 1,8 2,0 1,4 | |||||
| 2,0 2,2 1,8 | 8,0 8,4 8,0 | 2,0 3,0 2,4 | – – – | 1,6 2,0 1,2 | 0,8 0,6 1,0 | 1,2 1,4 1,2 | |||||
| 1,4 1,6 1,2 | 8,4 9,0 8,6 | 3,0 3,2 3,5 | – – – | – – – | – – – | 1,0 1,2 0,8 | |||||
| 1,8 1,6 1,4 | 8,0 7,8 8,6 | 3,0 2,8 3,2 | – – – | – – – | – – – | 1,2 1,4 1,0 | |||||
| 2,0 1,8 1,6 | 9,0 8,8 8,6 | 2,0 1,8 2,0 | – – – | – – – | 0,6 0,8 1,0 | 1,8 1,8 1,6 | |||||
| 1,2 1,0 1,4 | 8,0 7,8 8,4 | 2,0 1,6 1,8 | 2,2 2,0 2,0 | – – – | 0,8 1,0 0,8 | 1,2 1,4 1,0 | – – – | ||||
| 1,3 1,5 1,6 | 9,0 8,8 9,0 | 2,2 2,0 2,0 | – – – | – – – | – – – | 1,4 1,6 1,2 | |||||
| 1,2 1,3 1,4 | 8,2 8,4 8,6 | 2,4 2,0 2,0 | – – – | – – – | – – – | 1,6 1,4 1,2 | |||||
| 1,0 1,2 1,4 | 8,0 8,0 8,0 | 9,0 9,0 9,0 | – – – | – – – | 1,2 0,8 1,0 | – – – | |||||
| 1,2 1,4 1,3 | 7,0 7,2 7,6 | 2,0 1,8 1,6 | 2,2 2,0 2,0 | – – – | – – – | 1,2 1,0 1,4 | – – – |
| № схемы | Линейные размеры (м) | кН/м | F, кН | M, кН м | Углы,
град
| ||||||
| АЕ | AB | BC | CD | BD | q1 | q | 
|
| |||
| 1,4 1,2 1,4 | 7,0 7,0 7,2 | 2,0 2,2 2,0 | – – – | 2,5 2,4 2,2 | 0,8 0,8 1,0 | 1,8 1,4 1,6 | |||||
| 1,2 1,2 1,2 | 7,2 7,4 7,4 | 2,2 2,4 2,6 | – – – | – – – | – – – | 1,2 1,6 0,8 | |||||
| 1,2 1,4 1,2 | 8,0 8,2 8,0 | 3,0 3,2 3,2 | – – – | – – – | – – – | 1,2 1,4 0,8 | – – – | ||||
| 1,4 1,6 1,4 | 8,4 8,6 8,6 | 3,6 3,2 3,4 | – – – | – – – | – – – | 1,2 1,0 1,2 | |||||
| 2,0 1,8 1,6 | 8,0 8,2 8,0 | 2,4 2,4 2,6 | – – – | 1,6 1,6 1,8 | 0,8 0,8 1,0 | 1,4 1,2 1,2 | – – – | ||||
| 1,2 1,4 1,3 | 7,0 7,2 7,3 | 2,0 1,8 2,0 | 4,0 3,0 4,0 | – – – | – – – | 1,0 1,2 1,4 |
Пример 3.3выполнения расчетной работы № 3. Равновесие плоской произвольной системы сил, приложенной к системе связанных (сочлененных) между собой тел; в данном случае соединенных идеальным шарниром С. Схема составной конструкции показана на рис.3.6,а.
Дано:на составную конструкцию (система двух тел: балка АС и балка СВD) действуют: сосредоточенная сила  , момент пары сил М и равномерно распределенная по закону прямоугольника нагрузка интенсивности q на участке ВС, P=2 кН ; М = 7 кН·м; q=5 кН/м; a=3м; b=2м; d=4м; α = 30˚. В точке А балка АС жестко заделана в стене, а балка СВD опирается на катковую опору (подвижный шарнир) B. Заменимравномерно распределенную по закону прямоугольника нагрузку сосредоточенной силой
, момент пары сил М и равномерно распределенная по закону прямоугольника нагрузка интенсивности q на участке ВС, P=2 кН ; М = 7 кН·м; q=5 кН/м; a=3м; b=2м; d=4м; α = 30˚. В точке А балка АС жестко заделана в стене, а балка СВD опирается на катковую опору (подвижный шарнир) B. Заменимравномерно распределенную по закону прямоугольника нагрузку сосредоточенной силой  =
=  . приложенной посередине участка ВС.
. приложенной посередине участка ВС.
Определить: реакции в жесткой заделке А, момент в заделке  , реакцию в подвижном шарнире B и давление в промежуточном шарнире С.
, реакцию в подвижном шарнире B и давление в промежуточном шарнире С.
Решение.При рассмотрении равновесия составной конструкции в целом (АСВD) к системе приложены активные силы 
 и активная пара сил с моментом
и активная пара сил с моментом  Кроме того, на балку наложены связи: жесткая заделка А, катковая опора B. Отбрасывая мысленно связи, заменяем их действие реакциями (рис.3.6,а). Реакция жесткой заделки (табл.2.1, вар.13) заменяется неизвестной силой с двумя составляющими , , и моментом заделки
Кроме того, на балку наложены связи: жесткая заделка А, катковая опора B. Отбрасывая мысленно связи, заменяем их действие реакциями (рис.3.6,а). Реакция жесткой заделки (табл.2.1, вар.13) заменяется неизвестной силой с двумя составляющими , , и моментом заделки  ; реакция опоры B заменяетсянеизвестной силой (табл. 2.1, вар.4) . Оси координат выберем с началом в точке А, направив абсциссу по горизонтали вправо, ось ординат по вертикали вверх. В результате получаем следующую силовую схему конструкции (рис.3.6,а).
; реакция опоры B заменяетсянеизвестной силой (табл. 2.1, вар.4) . Оси координат выберем с началом в точке А, направив абсциссу по горизонтали вправо, ось ординат по вертикали вверх. В результате получаем следующую силовую схему конструкции (рис.3.6,а).
Поставленную задачу можно записать коротко следующим образом:
ACBD
 ,
,  .
.
Число неизвестных ( , ; ) – четыре, то есть больше числа уравнений равновесия - три, которые можно составить для этой системы сил. Поэтому для решения данной задачи составную конструкцию необходимо разделить на две части (т.е. на две подсистемы АС и СВD) по промежуточному шарниру С (рис.3.6,б). В месте разделения конструкции необходимо показать соответствующие реакции по взаимно противоположным направлениям для каждой из частей. Причем, соответствующие составляющие реакций равны по величине.

Расчетная схема из двух составных частей показана на рис.3.6,б. Каждая из частей находится в равновесии под действием произвольной плоской системы сил. Для каждой части конструкции можно составить по три уравнения равновесия, приняв ту же систему координат x y (x –по горизонтали вправо, y – по вертикали вверх).
Рассмотрим равновесие правой части (CBD) системы:
CBD 
 ,
,  , .
, .
К правой части системы CBD приложены неизвестные , , - всего три неизвестных, т.е. число неизвестных ( , , ) соответствует числу уравнений равновесия для произвольной плоской системы сил, приложенных к подсистеме CBD:
1.  P×cos a×+ = 0; ;
P×cos a×+ = 0; ;
2.  P×sin a- Q - + = 0; ;
P×sin a- Q - + = 0; ;
3.  P×sin a
P×sin a  - Q×b/2 +
- Q×b/2 +  = 0.
= 0.
Рассмотрим равновесие левой части (AC) системы:
AC
 , , .
, , .
К левой части AC балки приложены неизвестные силы  , и момент
, и момент  . Силы в точке C равны по величине и противоположны по направлению силам , . Всего в рассматриваемой задаче к конструкции приложено пять неизвестных сил и момент . Для каждой подсистемы (балки) CBD и AC имеем по три уравнения равновесия, т.е. для системы в целом - всего шесть уравнений. Задача статически определима, т.е. число неизвестных равно числу уравнений.
. Силы в точке C равны по величине и противоположны по направлению силам , . Всего в рассматриваемой задаче к конструкции приложено пять неизвестных сил и момент . Для каждой подсистемы (балки) CBD и AC имеем по три уравнения равновесия, т.е. для системы в целом - всего шесть уравнений. Задача статически определима, т.е. число неизвестных равно числу уравнений.
4. - = 0; ;
5. + = 0; ;
6. - + M + × а = 0.
Из (1): = - P×cos a = 2 × 0,866 = -1,7 kH.
Из (3): = (Q×1-P×6×sin 30°)×2 = (10× 1- 2×6×0,5 ) ×2 = 2kH.
Из (2): = P sin a - Q + = 2× 0,5 – 10 +2 = – 7kH.
Из (4): = = -1.7 кН.
Из (5): = - = 7 кН.
Из (6): = + M + × а = 7 + (-7)×3 = -14 kHм.
Для проверки полученных результатов можно составить уравнение моментов относительно какой-либо точки или уравнение проекций на ось x или y как для всей конструкции, так и для отдельных частей. Любое из этих уравнений при равновесии и подстановке полученных значений реакций должно рав няться нулю.
Исходные данные к расчетной работе № 4
| № схемы | Линейные размеры, м | Величины сил, Н | Плоскость, в которой лежит сила 
| Углы,
| ||||
| Н1 | Н2 | KD | F | G |
|
| ||
| 3,0 2,0 3,0 | 2,0 1,5 2,5 | 6,0 | Параллельна плоскости Ayz | |||||
| 1,5 2,0 2,0 | 1,0 1,0 1,5 | 1,0 0,8 1,8 | Вертикальная
плоскость, проходящая через ось  и диагональ плиты и диагональ плиты
| |||||
| 1,5 0,8 2,0 | 1,5 1,0 1,5 | 2,4 2,0 1,8 | Параллельна плоскости Ayz | |||||

| ||||||||
| 1,2 1,0 1,0 | 2,0 2,4 2,6 | 3,0 3,5 3,2 | Плоскость Ayz | |||||

| ||||||||
| 2,0 1,8 2,0 | 1,5 1,4 1,0 | Параллельна плоскости Axz | ||||||
| 2,4 2,0 2,0 | 1,2 1,5 1,2 | Плоскость Bxz | ||||||
| 1,5 1,8 1,2 | 1,0 1,2 0,8 | Параллельна плоскости Axz | ||||||

| ||||||||
| 2,0 1,5 2,0 | 1,5 0,9 1,2 | Параллельна плоскости Axz | ||||||

| ||||||||
| 5,0 4,0 3,0 | 3,0 3,0 2,5 | Параллельна плоскости Axz | ||||||
| 5,0 4,0 3,0 | 4,0 3,0 2,5 | Параллельна плоскости Ayz | ||||||
| 2,0 4,0 3,0 | 2, 0 3,5 2,0 | Параллельна плоскости Bxz | ||||||
| 1,2 1,0 1,0 | 2,0 2,4 2,6 | Параллельна плоскости Ayz | ||||||
| 2,0 2,5 3,0 | 1,5 2,0 2,0 | Лежит в плоскости Axz | - - - | |||||
| 1,5 3,0 2,5 | 2,0 4,0 3,0 | Параллельна плоскости Ayz | ||||||

| ||||||||
| 2,0 3,0 1,5 | 1,5 2,5 1,0 | Параллельна плоскости Axz | ||||||

|
Варианты 15, 16, 19, 20, 23, 24
Вертикальный ворот закреплен в точке A подпятником, а в точке B – цилиндрическим шарниром и нагружен так, как это показано на схемах конструкций (рис. 4.1). Определить при равновесии силы реакций закрепленных точек, а также натяжение  ведущей цепи 1, если
ведущей цепи 1, если  , где
, где  – натяжение ведомой цепи 2. Известно:
– натяжение ведомой цепи 2. Известно:  ,
,  . Значения величин
. Значения величин  ,
,  ,
,  ,
,  , углов , ,
, углов , ,  , образованных радиусами, проведенными в точке схода цепи (точке касания), с диаметром колеса, параллельным оси
, образованных радиусами, проведенными в точке схода цепи (точке касания), с диаметром колеса, параллельным оси
Последнее изменение этой страницы: 2016-07-23
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...