Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Центры тяжести простейших тел (тонких однородных пластин и линий)

Т а б л и ц а 5.2.
Центры тяжести простейших однородных объемных тел

РАСЧЕТНАЯ РАБОТА №5.
Центр тяжести однородных плоских фигур и линий
Определитьцентры тяжести однородных плоских фигур, линий и объемных тел, схемы которых представлены на рис.5.12, за исключением варианта 21, где приведена схема неоднородного объемного тела (скамейка). Исходные данные (размеры – в метрах) приведены ¾ в табл. 5.3.При выполнении данной расчетной работы рекомендуется пользоваться таблицами для определения центра тяжести простейших тел в зависимости от их геометрической формы
¾ для тонких однородных пластин и линий (стержней) - табл.5.1 и
¾ для однородных объемных тел -табл.5.2 , а также примерами расчета, приведенными в разделе.5.2. Для вариантов 11-21задача сформулирована конкретно в соответствии с номером варианта на рис.5.12.

Рис. 5.12. Схемы плоских фигур к расчетной работе №5
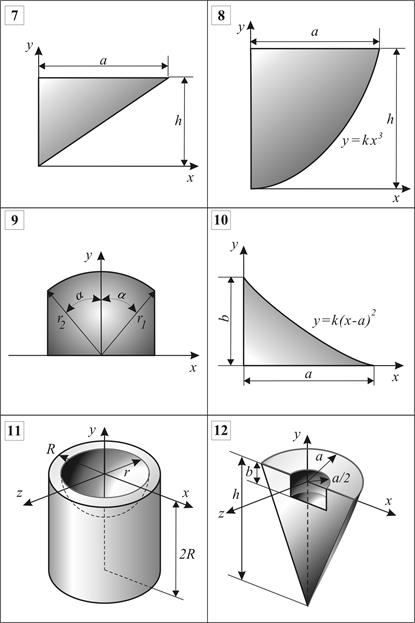
Рис. 5.12 (продолжение)

Рис. 5.12 (продолжение)

Рис. 5.12 (окончание)
Т а б л и ц а 5.3
Исходные данные к расчетной работе № 5
| № схемы | Л и н е й н ы е р а з м е р ы, м | ||||||||
| a=r | b | c | d | xc | yc | r1 | R | h | |
| 1.5 0.5 0.3 | 3.0 1.0 0.6 | 2.0 0.7 0.5 | |||||||
| 6.0 2.0 1.0 | 7.5 2.5 1.25 | ||||||||
| 0.6 1.2 0.2 | 1.6 3.2 0.5 | 0.9 1.8 0.3 | 1.2 2.4 0.6 | ||||||
| 0.24 0.60 1.20 | 0.16 0.4 0.4 | ||||||||
| 0.4 0.2 0.3 | |||||||||
| 0.1 0.2 0.3 | |||||||||
| r2 = 0.4 м. | |||||||||
| 0.4 0.5 0.6 | Определить прямым интегрированием координаты
центра тяжести пластины как функции  
| 0.3 0.4 0.5 | |||||||
| 0.4 0.5 0.6 | Определить прямым интегрированием координаты
центра тяжести пластины как функции
| 0.5 0.6 0.7 | |||||||
 Определить прямым
интегрированием координаты центра тяжести
пластины как функции Определить прямым
интегрированием координаты центра тяжести
пластины как функции  
| 0.5 0.6 0.7 | ||||||||
| 0.4 0.5 0.6 | 0.3 0.4 0.5 | Определить прямым интегрированием координаты центра тяжести тела вращения вокруг оси  как функции как функции  
| |||||||



| Ü а) | b) Þ | -1.2R -1.5R -R | ||||||
| 1.0 0.8 0.4 | 0.5 0.4 0.2 | ||||||||
| № схемы | Л и н е й н ы е р а з м е р ы, м | ||||||||
| a=r | b | c | d | xc | yc | r1 | R | h | |
| b) Þ | l


| a) Þ |
l
| ||||||
| 0.30 0.36 0.42 | 0.30 0.20 0.30 | 
| 0.8 0.8 0.8 |

| 0.15 0.10 0.15 | ||||
| 0.10 0.05 0.03 |

| 0.40 0.20 0.13 | 0.08 0.04 0.02 | ||||||
| 0.02 0.03 0.04 | 0.03 0.04 0.06 | 0.01 0.01 0.01 | d = 0.015 м , h1 = a , r = 0.0115 м,
R=0.0125 м ,  м, L =0.1 м. м, L =0.1 м.
| 0.06 0.07 0.12 | |||||
| 0.06 0.07 0.08 | 0.02 0.03 0.04 |
r = 0.016 м;  м, L =0.12 м. м, L =0.12 м.
| 0.06 0.03 0.12 | ||||||
| 0.11 0.22 0.08 | 0.02 0.03 0.04 | 0.02 0.02 0.02 | 0.10 0.20 0.08 | 
| 0.20 0.30 0.40 | ||||
| 0.15 0.30 0.11 | 0.30 0.60 0.22 | a) Þ | 0.06 0.06 0.06 | ||||||
| 0.12 0.24 0.36 | 0.06 0.12 0.18 | 0.012 0.020 0.030 |

| ||||||
| 0.20 0.25 0.30 | 0.03 0.04 0.05 | 0.07 0.10 0.06 | 0.10 0.12 0.12 |

| 0.40 0.50 0.35 |

Вариант 11.Определить а) координату  центра тяжести полого цилиндра с радиусами
центра тяжести полого цилиндра с радиусами  и высотой
и высотой  , т.е.
, т.е.  для дискретных значений
для дискретных значений  , приведенных в табл. 5.7 и b) ¾ соотношения
, приведенных в табл. 5.7 и b) ¾ соотношения  для дискретных значений , которые приведены в табл. 5.3 как функции от R, т.е.как
для дискретных значений , которые приведены в табл. 5.3 как функции от R, т.е.как  .
.
Вариант 12.Определить координату центра тяжести однородного тела, значения основных размеров которого приведены в табл.5.3. При выполнении данного варианта расчетной работы можно воспользоваться примером 5.7.
Вариант 13.Определить а) координату  центра тяжести тела для дискретных значений
центра тяжести тела для дискретных значений  , приведенных в табл. 5.3, т.е.
, приведенных в табл. 5.3, т.е.  и b) ¾ соотношения
и b) ¾ соотношения  для дискретных значения , которые приведены втабл.5.3 как функции
для дискретных значения , которые приведены втабл.5.3 как функции  , т.е.
, т.е.  .
.
Варианты 14, 15, 20.Определить координаты центра тяжести тел при заданных их размерах.
Вариант 16, 17, 18.Определить координаты , центра тяжести однородных тел при заданных их размерах.
Вариант 19.Садовый постамент состоит из пирамиды, установленной на плите высотой  м. Определить а) центр тяжести постамента от его верхней плоскости, b) ¾ минимальную высоту плиты
м. Определить а) центр тяжести постамента от его верхней плоскости, b) ¾ минимальную высоту плиты  , при которой центр тяжести постамента не будет превышать 0.3 м от его верхней плоскости.
, при которой центр тяжести постамента не будет превышать 0.3 м от его верхней плоскости.
Вариант 21.Определить координаты и центра тяжести садовой скамейки, состоящей из двух бетонных (плотностью 2320 кг/м3) опор, на которых закреплены сидение и спинка из деревянных досок, плотностью 470 кг/м3
и размерами каждой доски: толщина -b, ширина - d, длина L=1.18 м.
Пример 5.7выполнения расчетной работы № 5. Определение положения центра тяжести половины сплошного кругового конуса, представленного на рис.5.13.

Рис. 5.13
Так как плоскость xy -плоскость симметрии, то центр тяжести лежит в этой плоскости, а координата  0. Толщина выделенного элемента dx, объем которого определяется как
0. Толщина выделенного элемента dx, объем которого определяется как

Координаты центра тяжести  и
и  выделенного элемента определяются как
выделенного элемента определяются как
 , =
, =  ,
,
где определяется из табл. 5.1 для полукруга.
Из рис. 5.13 видно, что  , откуда находим
, откуда находим 
Объем половины сплошного кругового конуса находим как

Момент выделенного дифференциального элемента относительно плоскости yz есть  ; Полный моментрассматриваемоготелаотносительно этой же плоскости
; Полный моментрассматриваемоготелаотносительно этой же плоскости

Таким образом, абсцисса центра тяжести тела определяется по формуле
 ◄
◄
Аналогично находим полный моментрассматриваемоготелаотносительно плоскости xz

Ордината центра тяжести тела

 ◄
◄
КОМПЬЮТЕРНЫЕ ВАРИАНТЫ ЗАДАЧ
ПО ОСНОВНЫМ РАЗДЕЛАМ СТАТИКИ
Рассмотрим компьютерные варианты задач по основным разделам статики, представленные на рис. 6.1, для решения которых и анализа результатов требуется программное обеспечение. Линейные размеры и действующие на конструкцию нагрузки приведены в таблице 6.1. Физико-математические модели соответствуют номеру рисунка схемы.
Вариант 1. Положение стержня AB , весом  , один конец которого закреплен в неподвижном шарнире A , другой конец опирается на шарнир тележки D , изменяется при медленном перемещении тележки D влевопод действием силы P. Пренебрегая трением, используя компьютерное программное обеспечение, вычислить и построить график изменения величины силы P как функции
, один конец которого закреплен в неподвижном шарнире A , другой конец опирается на шарнир тележки D , изменяется при медленном перемещении тележки D влевопод действием силы P. Пренебрегая трением, используя компьютерное программное обеспечение, вычислить и построить график изменения величины силы P как функции  , т.е.
, т.е.  при изменении в пределах
при изменении в пределах  . Определить максимальное значение силы
. Определить максимальное значение силы  и соответствующее ему значение .
и соответствующее ему значение .
Вариант 2. Положение L - образного рычага определяется канатом BE, закрепленным в точке B. Зная, что на стержень действует сила  , используя компьютерное программное обеспечение, вычислить и графически отобразить
, используя компьютерное программное обеспечение, вычислить и графически отобразить  как функции угла поворота стержня
как функции угла поворота стержня  при изменении его в следующих пределах
при изменении его в следующих пределах  . Определить максимальное значение силы
. Определить максимальное значение силы  и соответствующее ему значение .
и соответствующее ему значение .
Вариант 3.Тонкий стержень AB , весом G и длиной  , шарнирно связан с ползунами A и B, свободно перемещающихся соответственно в вертикальной и горизонтальной направляющих. Жесткость пружины
, шарнирно связан с ползунами A и B, свободно перемещающихся соответственно в вертикальной и горизонтальной направляющих. Жесткость пружины  , пружина не напряжена при горизонтальном положении стержня AB. Пренебрегая весом ползунов, вывести уравнения движения стержня в зависимости от
, пружина не напряжена при горизонтальном положении стержня AB. Пренебрегая весом ползунов, вывести уравнения движения стержня в зависимости от  и
и  , которые должны удовлетворять условиям равновесия стержня. Для заданных величин
, которые должны удовлетворять условиям равновесия стержня. Для заданных величин  a) вычислить и построить график изменения величины жесткости пружины как функции угла поворота стержня AB, т.е.
a) вычислить и построить график изменения величины жесткости пружины как функции угла поворота стержня AB, т.е.  , при изменении в следующих пределах:
, при изменении в следующих пределах:  b) определить два значения угла , соответствующих равновесию стержня при жесткости пружины
b) определить два значения угла , соответствующих равновесию стержня при жесткости пружины 
Вариант 4.ПанельABCвесом  удерживается в положении равновесия под углом к вертикали петлями A и B ипосредством каната CD, прикрепленного к панели в точке С, проходящего черезблок D иудерживаемого цилиндрическим грузом веса G. Пренебрегая трением, используя компьютерное программное обеспечение, вычислить и построить график изменения величины веса груза G, соответствующей условию равновесия плиты, как функции , т.е.
удерживается в положении равновесия под углом к вертикали петлями A и B ипосредством каната CD, прикрепленного к панели в точке С, проходящего черезблок D иудерживаемого цилиндрическим грузом веса G. Пренебрегая трением, используя компьютерное программное обеспечение, вычислить и построить график изменения величины веса груза G, соответствующей условию равновесия плиты, как функции , т.е.  при изменении угла в пределах
при изменении угла в пределах  Определить величину угла , соответствующую равновесию системы, когда
Определить величину угла , соответствующую равновесию системы, когда
G =0.09 кH.
Вариант 5.Однородная стальная плитаABCD, весом G, приварена к валу EF, и удерживается в указанном на рисунке положении  моментом пары
моментом пары  . Учитывая, что подшипники предотвращают скольжение вала вдоль EF и что вал лежит в плоскости
. Учитывая, что подшипники предотвращают скольжение вала вдоль EF и что вал лежит в плоскости  построить график изменения величины момента пары в функции угла поворота , т.е.
построить график изменения величины момента пары в функции угла поворота , т.е.  при изменении угла в пределах
при изменении угла в пределах
Вариант 6.В представленном на рисунке механизме положение стрелы AC управляется стержнем BD. Для заданной силы  вычислить реакцию в шарнире A и момент пары
вычислить реакцию в шарнире A и момент пары  , удерживающие систему в положении равновесия, и графически построить зависимости: реакции в шарнире A ¾
, удерживающие систему в положении равновесия, и графически построить зависимости: реакции в шарнире A ¾  и момента пары в функции угла поворота , т.е.
и момента пары в функции угла поворота , т.е.  и при изменении угла в пределах
и при изменении угла в пределах  Определить также a) величину угла , при котором момент пары достигает максимальной величины, т.е.
Определить также a) величину угла , при котором момент пары достигает максимальной величины, т.е.  ; b) величину угла , при котором реакция в шарнире A достигает максимальной величины, т.е.
; b) величину угла , при котором реакция в шарнире A достигает максимальной величины, т.е.  .
.
Вариант 7.Ферма ABC, состоящая из трех невесомых стержней, закреплена в точке A цилиндрическим шарниром, а точке С ¾ цилиндрическим шарниром на катках. Определить усилия в стержнях, вызываемые силой  , и отобразить графически изменения этих усилий для каждого стержня при изменении параметра
, и отобразить графически изменения этих усилий для каждого стержня при изменении параметра  в следующем диапазоне:
в следующем диапазоне:  .
.
Вариант 8. Стержень CD прикреплен к втулке D ипроходит через втулку, приваренную к концу B рычага AB. Принимая за начальное положение рычага AB, указанное на рисунке при =15°, используя программное обеспечение, рассчитать и построить зависимость величины момента пары М, необходимого для равновесия системы при действии силы как функции угла поворота  для 15 ° £ £ 90 °. Определить угол , при котором величина момента М будет минимальной.
для 15 ° £ £ 90 °. Определить угол , при котором величина момента М будет минимальной.
Вариант 9.
Однородная круглая пластина радиуса R и веса поддерживается тремя вертикальными проволоками, которые располагаются на одинаковом расстоянии друг от друга по краю пластины. Груз Е веса  =0.03 кН помещен на пластину в точку D и от нее начинает медленно двигаться вдоль диаметра CD, пока не достигает точки C. Графически построить зависимость сил натяжения проволок A и C в функции перемещения a, где a - расстояние груза Е от точки D;определить значение a, при котором силы натяжения проволок A и C являются минимальными.
=0.03 кН помещен на пластину в точку D и от нее начинает медленно двигаться вдоль диаметра CD, пока не достигает точки C. Графически построить зависимость сил натяжения проволок A и C в функции перемещения a, где a - расстояние груза Е от точки D;определить значение a, при котором силы натяжения проволок A и C являются минимальными.
Вариант 10.Груз массой m, подвешенный к тросу, удерживается пружиной AB жесткостью с. Длина недеформированной пружины соответствует положению механизма, когда угол q = 0. Зная, что жесткость пружины с =1 кН/ м, используя вычислительное программное обеспечение, а) вычислить и графически построить функциональную зависимость массы груза m,

Рис. 6.1 Схемы конструкций

Рис. 6.1 (окончание)
соответствующую равновесию системы, в функции угла q, т.е.  для значений угла q от 0 до 90 °, т.е. 0£ q £ 90°. b) Определить величину q, соответствующую равновесию системы, когда масса груза m = 2 кг.
для значений угла q от 0 до 90 °, т.е. 0£ q £ 90°. b) Определить величину q, соответствующую равновесию системы, когда масса груза m = 2 кг.
Т а б л и ц а 6.1
Исходные данные
| № схе мы | Силы, кН | Линейные размеры, м | |||||||
|
| 
| 
| a | b | c | h | r | R | |
| 0.09 0.10 0.12 | 1.0 1.2 1.4 | 0.4 0.6 0.8 | |||||||
| 0.20 0.25 0.30 | 0.24 0.30 0.35 | 0.30 0.35 0.40 | 0.08 0.10 0.12 | 0.32 0.35 0.40 | |||||
| 0.045 0.050 0.060 | |||||||||
| 0.20 0.25 0.30 | 0.125 0.150 0.200 | 0.10 0.15 0.20 | |||||||
| 0.63 0.80 1.00 | 0.84 1.00 1.20 | 0.48 0.60 0.80 | |||||||
| 3.20 4.00 4.50 | 1.50 1.80 2.00 | 2.40 3.00 3.50 | 0.90 1.00 1.20 | ||||||
| 1.25 1.50 1.75 | 4.00 4.50 5.00 | ||||||||
| 0.17 0.20 0.25 | 0.125 0.150 0.200 | 0.10 0.15 0.20 | |||||||
| 0.24 0.30 0.35 | 0.80 1.00 1.20 | 0.60 0.80 1.00 | 0.40 0.60 0.80 | 0.30 0.35 0.40 | |||||
| 0.40 0.60 0.80 | 0.20 0.25 0.30 | ||||||||
| 0.40 0.60 0.80 | 0.20 0.25 0.30 | ||||||||
| 0.26 0.30 0.35 | 0.30 0.35 0.40 |
П р и л о ж е н и е
Образец оформления титульного листа
Балтийский государственный технический университет «ВОЕНМЕХ»
им. Д.Ф. Устинова
Кафедра теоретической механики и баллистики
СТАТИКА
Расчетная (курсовая) работа
Тема: 1. Плоская система сил:
Расчетная работа № 1. Равновесие тела, которое может опрокиды ваться, вариант №____
Расчетная работа № 2. Равновесие произвольно расположенной системы сил, действующих на одно тело, вариант №____
Расчетная работа № 3. Равновесие произвольно расположенной системы сил, действующих на сочлененные тела, вариант №____
Тема: 2. Пространственная система сил
Расчетная работа № 4. Равновесие пространственной системы сил,
вариант №____
Тема: 3. Центр тяжести твердого тела
Расчетная работа № 5. Центр тяжести твердого тела, вариант №____
Тема: 4. Компьютерные варианты задач по статике, вариант №____
Фамилия И.О. студента _______________
факультет, группа ____________________
Преподаватель ______________________
Дата сдачи ___________________________
Санкт-Петербург
О Г Л А В Л Е Н И Е
Предисловие……………………………………………………………… 3
1. ОБЩИЕ ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ РАСЧЕТНОЙ И
КУРСОВОЙ РАБОТЫ………………………………………………..5
2. КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ…………………………………6
Типичные виды связей и их реакции………………………………...7
Момент силы относительно точки и относительно оси …..……….8
3. РАВНОВЕСИЕ ПЛОСКОЙ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ 12
3.1. Равновесие одного тела…………………………………………13
Расчетная работа №1. Равновесие тела, которое может
опрокидываться………………………………………………………14
Расчетная работа №2. Равновесие плоской произвольно
расположенной системы сил …………………………………………
3.2.Равновесие сочлененных (связанных) тел…………………….
Расчетная работа №3. Равновесие сочлененных тел………
4. РАВНОВЕСИЕ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ….
Расчетная работа №4. Равновесие пространственной системы сил
Примеры выполнения расчетной работы №4..………………………48
5. ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА…………………………………
5.1. Определения, свойства и координаты центра тяжести……….
5.2. Методы нахождения центра тяжести………………………….
Расчетная работа №5. Центр тяжести однородных плоских
фигур, линий и объемных тел………………………………………..
Пример выполнения расчетной работы №5..………………………..
6. КОМПЬЮТЕРНЫЕ ВАРИАНТЫ ЗАДАЧ ПО ОСНОВНЫМ
РАЗДЕЛАМ СТАТИКИ………………………………………………
П р и л о ж е н и е. Образец оформления титульного листа………
Последнее изменение этой страницы: 2016-07-23
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...