Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Амплитудный способ управления двигателем
Рассмотрим амплитудный способ управления скоростью вращения двухфазного асинхронного двигателя путем регулировки амплитуды управляющего сигнала на обмотке управления. Амплитуда напряжения возбуждения остается неизменной.

На схеме показано, как происходит управление частотой вращения ротора.
Изменение (уменьшение) напряжения управления от номинального приводит к искажению вращающегося магнитного поля в статоре. Оно становится эллиптической формы.




При  =0 поле превращается в пульсирующее.
=0 поле превращается в пульсирующее.

Можно показать, что любое эллиптическое поле представляется в виде 2-х круговых, вращающихся в разные стороны магнитных полей. Например, если амплитуда тока возбуждения составляет три условные единицы, а управления одну, то одно круговое поле образуется двумя условными единицами по управлению и возбуждению, а другое - одной единицей по возбуждению и минус одной по управлению (то есть вращение поля идет в другую сторону).
Для получения механической характеристики такого двигателя строят на одном графике две механические характеристики для двигателе с получившимися круговыми полями. При этом одна характеристика строится для положительных значений частот вращения, а другая – для отрицательных. Эти характеристики отличаются друг от друга знаками и значениями модулей критических моментов. Характеристика двигателя при данной величине напряжения управления получается геометрическим сложением исходных характеристик для двигателей с круговыми вращающими в разные стороны полями.
Заметим, что внутренние сопротивления роторов двухфазных асинхронных двигателей делают такими, чтобы критические значения частот вращения были бы близки к нулю.
В следующей лекции будут рассмотрены механические характеристики двухфазных асинхронных двигателей
Добавить график
Лекция 11
Передаточная функция, структурная схема двухфазного асинхронного исполнительного двигателя.

Для получения передаточной функции двигателя его механическую характеристику подвергают линеаризации в рабочем диапазоне частот вращения  . Обычно
. Обычно  . Этот диапазон закладывают при проектировании будущей системы.
. Этот диапазон закладывают при проектировании будущей системы.

Запишем два уравнения динамики двигателя для линеаризованного варианта механической характеристики.





Пусть: 




Структурная схема совпадает со структурной схемой двигателя постоянного тока.
Определение коэффициентов a и b по паспортным данным двигателя
Паспортные данные:
 и
и 
 (примерно 0.6)
(примерно 0.6)

Считается, что


Из этой системы находим:

Пусть  ,
, 



Асинхронный запуск синхронного двигателя
По конструкции синхронный двигатель аналогичен конструкции синхронного генератора:

Внутри статора круговое вращающееся поле. Скорость вращения равна скорости вращающегося поля. Чтобы запустить двигатель, нужно разогнать ротор (где-то до скорости  ). В ротор встраивается беличья клетка и наматывается обмотка для запитки постоянным током. При запуске обмотку не запитывают. Тогда двигатель превращается в асинхронный. Разгоняется до скорости несколько меньшей частоты вращения магнитного поля
). В ротор встраивается беличья клетка и наматывается обмотка для запитки постоянным током. При запуске обмотку не запитывают. Тогда двигатель превращается в асинхронный. Разгоняется до скорости несколько меньшей частоты вращения магнитного поля  . Затем подключается обмотка ротора к источнику постоянного тока и ротор втягивается в синхронизм. Он догоняет магнитное поле. При этом в беличьей клетке ток будет отсутствовать. Беличья клетка нужна только для разгона.
. Затем подключается обмотка ротора к источнику постоянного тока и ротор втягивается в синхронизм. Он догоняет магнитное поле. При этом в беличьей клетке ток будет отсутствовать. Беличья клетка нужна только для разгона.
Лекция 12
Шаговые двигатели
Шаговые двигатели – устройства, которые преобразуют электрические импульсы напряжения управления в дискретные (скачкообразные) угловые или линейные перемещения ротора с возможной его фиксацией в нужных положениях.


Шаговые двигатели
Магнитоэлектрические Индукционного типа
Принцип работы (принцип построения)
1) Магнитоэлектрический

2) Индукционный

Если замыкаются и в 1) и в 2) ключи, то сердечник принимает вертикальное положение (что обеспечивает минимальное магнитное сопротивление, т.е. минимизируется длина магнитных силовых линий)
Если потом ключи разомкнуть, то в схеме 1) он останется в том же положении, поскольку сам создает магнитное поле и будет удерживаться в этом положении, даже если будет действовать на него внешний небольшой момент. Вторая схема не обладает таким свойством. Если разомкнуть ключ и прикладывать внешний момент, сердечник будет вращаться. Двигатели 1-го типа не могут быть сделаны на малые шаги, минимальный шаг 11  (
(  ), а второго до 2 -3 (
), а второго до 2 -3 (  )
)
Конструкция и принцип управления шаговым двигателем
Шаговый двигатель состоит из двух частей: статор и ротор. Для любого типа двигателей статор делается по одному принципу.
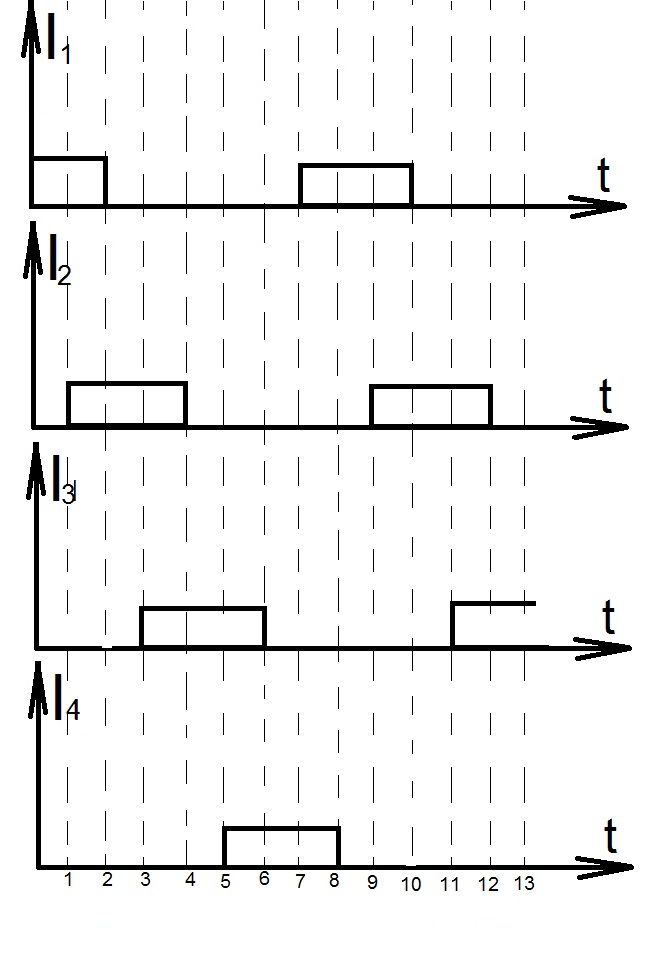
Пример (для магнитоэлектрического). На статоре двигателя обычно имеется четыре, сдвинутых на 90 градусов друг относительно друга, обмотки
| Если в исходном положении ротор в виде постоянного магнита расположен вертикально, при подключении второй обмотки к источнику постоянного напряжения ротор повернется на 90 . Далее отключается вторая обмотка и подключается третья и ротор повернется еще на 90 и т.д. Величина шага в этом случае составляет 90 .
|


Величину шага можно уменьшить (дробление шага) в два раза  за счет усложнение логики коммутации обмоток. Смысл этой логики показан на графиках ниже.
за счет усложнение логики коммутации обмоток. Смысл этой логики показан на графиках ниже.
При 4-х обмотках и 1 магните шаг меньше 45 сделать нельзя. Для уменьшения шага надо увеличивать количество магнитов на роторе
У ротора с двумя постоянными магнитами минимальный шак при простой коммутации составляет уже 

 N – число обмоток
m – логика переключения обмоток (1 или 2)
k – количество магнитов на роторе
N – число обмоток
m – логика переключения обмоток (1 или 2)
k – количество магнитов на роторе
|

Для двигателя с 4 обмотками, электрически дроблением шага и 4 магнитами на роторе минимальный шаг составляет  .
.
Рассмотрим принцип работы двигателя индукционного типа.

При запитке обмотки 2-2’ зубцы ротора и второго полюса располагаются друг против друга. При этом зубцы ротора и первого полюса сдвинуты друг относительно друга на половину одного зубца, как показано на рисунке.
Например, если на роторе 30 зубцов, то один зубец со впадиной составляют  . Сдвижка на половину зубца составляет
. Сдвижка на половину зубца составляет  . Эта величина и составит минимальный шаг, при переключении на обмотку первого полюса.
. Эта величина и составит минимальный шаг, при переключении на обмотку первого полюса.
Схема управления шаговым двигателем

Лекция 13
Последнее изменение этой страницы: 2016-07-23
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...