Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Бесконтактный двигатель постоянного тока (БДПТ)
На базе шагового двигателя
Функциональная схема
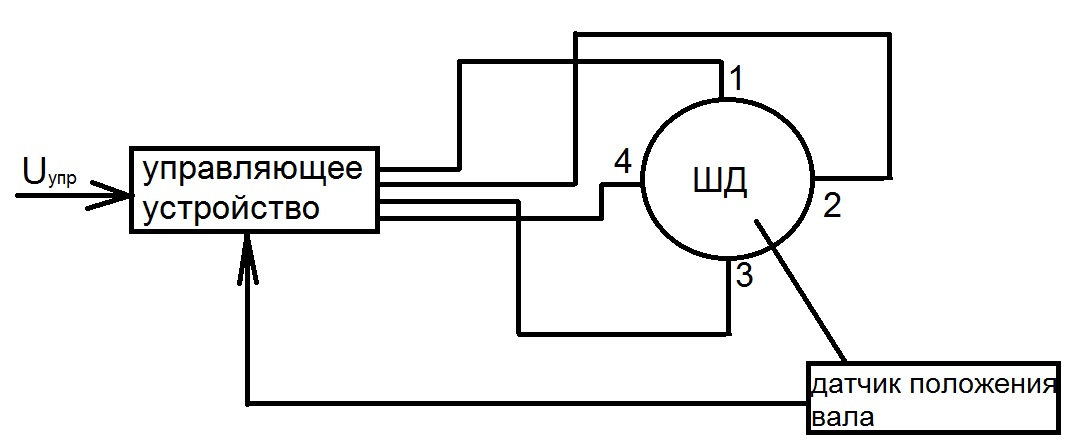
В качестве датчика положения часто используется датчик Холла

Датчик Холла это полупроводниковый прибор с четырьмя выводами. К двум из них подводится напряжение от источника постоянного тока, с двух других снимается напяжение в том случае, когда прибор оказывается в магнитном поле. В БДПТ ротор – это вращающийся магнит, который периодически своим магнитным полем открывает и закрываетдатчик Холла. На выходе датчика появляются импулься напряжения, соответствующие моментам времени, когда магнит ротора оказывается под датчиком.

В БДПТ под каждой из четырех статорных обмоток располагается свой датчик Холла (Дх) Выход каждого датчика управляет открытием транзистора, через который запитывается соседняя обмотка. Например, сигнал с датчика Дх1, когда ротор находится под обмоткой 1, включает транзистор VT2 и подключает обмотку 2. Магнит поворачивается к этой обмотке и при этом отключается VT1. Подойдя к обмотке 2, Дх2 включает VT3 и при этом запитывается обмотка 3 и так далее.
БДПТ, например, массово используется для вращения дисков в запоминающих устройствах ЭВМ.
Моментный двигатель
Назначение – создание момента. Обычный двигатель постоянного тока может работать, как моментный.
 При
При 

 - описывает работу моментного двигателя (динамики нет)
- описывает работу моментного двигателя (динамики нет)
Для обычного стандартного двигателя длительный пусковой режим без разрешения вращения не допустим (из-за большого пускового тока, который может привести к выходу из строя двигателя вследствие перегрева).
Надежность этого двигателя из-за коллектора невысокая. Можно делать моментные двигатели бесконтактными на базе шаговых или синхронных машин со специальной схемой управления.

На правом графике показано изменение момента, развиваемого двигателем, при запитке первой обмотки (вертикальная обмотка) постоянным током, если под действием внешнего момента происходит поворот вала ротора на угол  . Здесь видно, что наибольший момент создает эта обмотка в окрестностях углов
. Здесь видно, что наибольший момент создает эта обмотка в окрестностях углов  , а в окрестности 0 необходимо совместно подключать 2 и 3 обмотки. Таким образом, комбинируя подключение и отключение обмоток для разных углов поворота ротора, можно реализовать максимально возможный момент, развиваемый двигателем.
, а в окрестности 0 необходимо совместно подключать 2 и 3 обмотки. Таким образом, комбинируя подключение и отключение обмоток для разных углов поворота ротора, можно реализовать максимально возможный момент, развиваемый двигателем.
Электромеханические устройства измерения
Рассогласования (ИР)

Будем рассматривать два типа ИР:
1) Потенциометрические
2) Трансформаторные
Потенциометрические измерители рассогласований
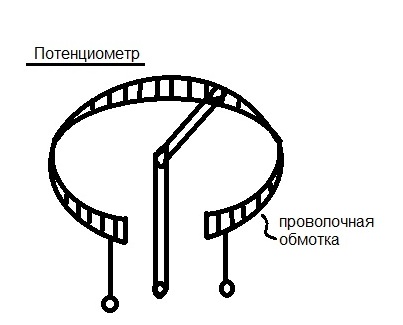
Для реализации потенциометрических ИР используют два круговых проволочных потециометра. Движок одного потециометра соединен со входным валом, положение которого обычно задает оператор (это потенциометр – датчик), а движок другого потенциометра (потенциометр – приемник) соединен с валом нагрузки. Схема соединений потециометров, показанная ниже, образует потенциометрический ИР.


 Если
Если 
 Т.е .
Т.е .  ; ; 
|

Принципиальная электрическая схема такого ИР представляет собой измерительный мост.
Недостаток такого ИР: - имеется сектор, выпадающий из управления, так как обычные потенциометры имеют ограниченный угол поворота меньший 360  .
.
Измеритель рассогласований без ограничения на угол
поворота

Для построения ИР без ограничения на угол поворота используются специальные круговые потенциометры со сплошной обмоткой по кругу и с тремя выводами через  У этих потенуиометров далается по два изолированных скользящих контакта (движка).
У этих потенуиометров далается по два изолированных скользящих контакта (движка).

Достоинства:
Малый вес, размер, могут работать как на постоянном, так и на переменном токе.
Недостатки:
Трущиеся контакты; дискретность характеристики из-за перепрыгивания контактов с витка на виток: понижается надежность; источник помех.
Лекция 14
Погрешности потенциометра.


1)  - погрешность по макс.значению сопротивления
- погрешность по макс.значению сопротивления
2)  - погрешность линейности этого потенциометра.
- погрешность линейности этого потенциометра.
Где 
Последнее изменение этой страницы: 2016-07-23
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...