Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
РАСЧЕТ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ
Элементы систем автоматического регулирования могут иметь различные конструктивные формы, различные схемы и различные физические принципы действия. Однако с точки зрения теории автоматического регулирования более целесообразно классифицировать их по динамическим свойствам. При этом для исследования процессов в реальных системах пользуются идеализированными схемами, которые точно описываются математически и приближенно характеризуют реально существующие звенья.
Как уже было сказано, динамические свойства линейных элементов описываются линейными дифференциальными уравнениями. В общем случае порядок дифференциального уравнения элемента может быть произвольным. Однако такой сложный элемент всегда может быть представлен в виде сочетания так называемых типовых динамических звеньев, описываемых простейшими уравнениями.
Число таких типовых динамических звеньев невелико. Они описываются линейными дифференциальными уравнениями, которые имеют порядок не выше второго.
Звено называют усилительным, если его входная и выходная величины связаны алгебраическим уравнением вида

где К—коэффициент усиления звена.
Предполагается, что передача сигнала от входа к выходу производится мгновенно, без какой-либо инерции. Поэтому усилительное звено часто называют безынерционным.
Переходная функция звена при подаче на его вход воздействия типа единичного скачка (Хвх==1) имеет вид

График переходной функции показан на рис. 12.1,а. Эта функция соответствует идеальному усилительному звену. Отклонение характеристики реального звена от идеального показано пунктиром.
Передаточная функция звена

Уравнение амплитудно-фазовой характеристики имеет вид

В этом выражении мнимая часть W(jω) равна нулю, а вещественная часть равна К.. Годограф амплитудно-фазовой характеристики (рис. 12.1,6) представляет собой точку на вещественной оси на расстоянии К. от начала координат.
Примеры усилительных звеньев: рычажная и редукторная передачи, манометр.
Звено называется апериодическим, если его входная и выходная величины связаны дифференциальным уравнением вида

где Т и К—соответственно постоянная времени и коэффициент усиления звена. Такое звено также называют инерционным.
После решения уравнения (12.5) при скачкообразном характере изменения входной величины (Хвx=const) получим уравнение экспоненты

При t→∞ выходная величина Хвых стремится к новому установившемуся значению КХвх.


Изменяя то от 0 до ∞, подучим годограф амплитудно-фазовой характеристики звена (рис. 12.2,6). Он представляет собой полуокружность радиусом К/2, расположенную в IV квадранте комплексной плоскости с центром на вещественной оси и на расстоянии К/2 от начала координат.
Примеры апериодических звеньев: рассмотренный" сепаратор, термопара, контур из сопротивления и емкости.
Звено называют интегрирующим, если его выходная величина пропорциональна интегралу по времени от входной величины:
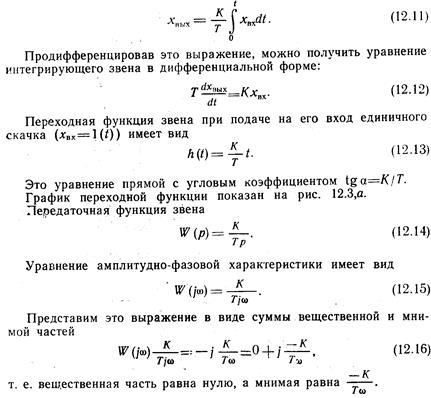
Годограф амплитудно-фазовой характеристики звена показан на рис. 12.3,б. Он представляет собой прямую, совпадающую с отрицательной мнимой полуосью координат.
Примеры интегрирующих звеньев: поршневой гидравлический исполнительный механизм, у которого входом является количество жидкости, подаваемой в цилиндр, а выходом — перемещение поршня; конденсатор, заряжаемый током.
Звено называется дифференцирующим, если его выходная величина пропорциональна скорости изменения входной. Различают идеальное и реальное дифференцирующее звенья.
Дифференциальное уравнение идеального дифференцирующего звена имеет вид

Так как в реальных условиях элементов, описываемых уравнениями типа (12.17), не существует, в число типовых звеньев вводится звено, выполняющее дифференцирующее действие более или менее приближенно. Такое звено называют реальным дифференцирующим.
Дифференциальное уравнение реального дифференцирующего звена имеет вид

После решения уравнения .(12.18) при скачкообразном характере изменения входной величины Хвx==const получим уравнение экспоненты

При t=0 выходная величина Хвых=КХвх, при t→∞ выходная величина .Хвых→0. ...

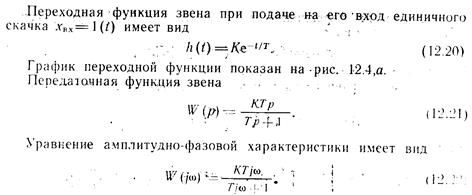
Представим это выражение в виде суммы вещественной и мнимой частей.

Годограф амплитудно-фазовой характеристики звена показан на рис. 12.4,6. Он представляет собой полуокружность радиусом К/2, расположенную в I квадранте комплексной плоскости с центром на вещественной оси и на расстоянии К/2 от начала координат.
Примеры реальных дифференцирующих звеньев: цепь с сопротивлением и емкостью, гидравлический успокоитель с пружиной.
Звено называют колебательным, если связь между выходной и входной величинами определяется уравнением вида

Переходная функция звена при подаче на его вход единичного скачка Хвх==1(t) имеет вид

График переходной функции показан на рис. 12.5,а (кривая 1). При t→∞ эта функция стремится к новому установившемуся значению, совершая вокруг него затухающие колебания с частотой ω.


Годограф амплитудно-фазовой характеристики звена показан на рис. 12.5,б. Примеры колебательных звеньев: электрический контур, содержащий емкость; индуктивность и омическое сопротивление; дифференциальный манометр.
Как уже было сказано, колебательный затухающий процесс в звене, описываемом уравнением (12.24), имеем лишь в том случае, когда корни характеристического уравнения являются комплексными с отрицательной вещественной частью [см. соотношение (12.28)].
Если Т  -4Т
-4Т  >0, т.е. Т2>2Т1, то корни характеристического уравнения получаются вещественными. Решение уравнения (12.24) будет иметь вид
>0, т.е. Т2>2Т1, то корни характеристического уравнения получаются вещественными. Решение уравнения (12.24) будет иметь вид

где А1 .и А2 постоянные интегрирования; р1, р2—корни характеристического уравнения.
Переходная функция имеет вид

 График переходной функции показан на рис. 12.5,а (кривая 2). Эта функция при t→∞ стремится к новому установившемуся значению, не превышая его, т. е. апериодически.
График переходной функции показан на рис. 12.5,а (кривая 2). Эта функция при t→∞ стремится к новому установившемуся значению, не превышая его, т. е. апериодически.
Такое звено можно представить как два последовательно соединенных апериодических звена и поэтому называется апериодическим звеном II порядка. Этот случай имеет большое значение в практических исследованиях, так как такими переходными функциям и обладают многие технологические объекты.
В реальных технологических объектах часто при изменении входной величины выходная начинает изменяться не сразу, а по истечении некоторого времени, называемого временем запаздывания.
Для характеристики таких объектов вводится понятие звена запаздывания,: в; котором выходная величина повторяет характер изменения входной величины без искажения, но с некоторым отставанием по времени. Тогда объект с запаздыванием может быть представлен как сочетание рассмотренных звеньев и звена запаздывания.
Уравнение звена запаздывания имеет вид
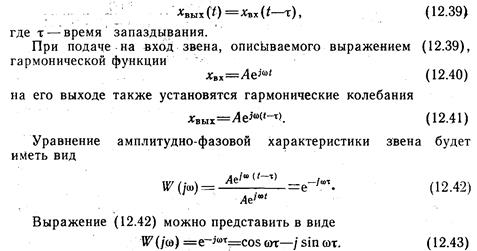
Годограф амплитудно-фазовой характеристики звена запаздывания, построенный по уравнению (12.43), показан на рис. 12.6,6. Он представляет собой окружность с центром в начале координат и радиусом, равным единице.
Передаточная функция звена

График переходной функции звена показан на рис. 12.6,а.
СПОСОБЫ СОЕДИНЕНИЯ ЗВЕНЬЕВ
Как уже было сказано, свойства элементов и систем автоматического регулирования в динамике описываются дифференциальными уравнениями. Поэтому, если известны дифференциальные уравнения отдельных элементов, то, получив дифференциальное уравнение всей системы в целом и решение этого уравнения, можно исследовать динамические свойства системы.
Операция составления дифференциального уравнения системы может быть существенно облегчена, если реально существующие элементы системы заменить типовыми динамическими звеньями или их сочетаниями.

Схема системы автоматического регулирования, в которой реально существующие элементы заменены типовыми динамическими звеньями, называется структурной схемой.
Для получения дифференциального уравнения системы необходимо составить ее структурную схему, найти передаточную функцию и затем от передаточной функции системы перейти к дифференциальному уравнению.
При этом необходимо учитывать правила вычисления передаточной функции соединения звеньев.
1. Система автоматического регулирования Представлена структурной схемой в виде трех последовательно соединенных звеньев с передаточными функциями W1(p), W2(p), W3(p) (рис. 12.7,а). При таком включении выходная величина предыдущего элемента является входной величиной для последующего элемента.
Так как

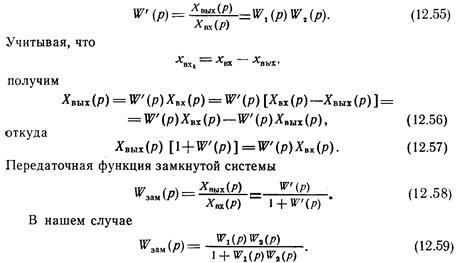
3. Система автоматического регулирования состоит из двух последовательно соединенных звеньев, которые охвачены отрицательной обратной связью (рис. 12.7,в). В практике расчета CAP линию обратной связи называют часто цепью обратной связи, а основную линию, связывающую входную и выходную величины, — прямой цепью.
Обозначим передаточную функцию элементов, расположенных в прямой цепи, через W′(p).
Тогда
4. Система автоматического регулирования состоит из двух последовательно соединенных звеньев в прямой цепи, охваченных отрицательной обратной связью, в которой установлено звено с передаточной функцией Woc(p) (рис. 12.7,г).
Передаточная функция элементов в прямой цепи


ПОНЯТИЯ УСТОЙЧИВОСТИ СИСТЕМЫ
Как уже указывалось, основная задача системы автоматического регулирования заключается в поддержании регулируемого параметра в пределах допуска на отклонение от заданного значения. Этому препятствует неизбежное во всякой системе наличие возмущающих воздействий, вызывающих отклонение текущего значения регулируемого параметра от заданного. Автоматический регулятор стремится устранить это отклонение. В результате воздействия на систему возмущений и регулятора в ней возникает переходный процесс, который для исследуемых линейных систем описывается уравнением вида

Решение этого уравнения Хвых(t)—зависимость изменения выходной величины (регулируемого параметра) под действием возмущения (Хвх) — может быть представлено как сумма двух составляющих:

Первая составляющая Хвыхс (t) характеризует свободное движение системы и определяется свойствами системы и начальными условиями. Вторая составляющая Хвыхв (t) характеризует вынужденное движение системы и определяется свойствами системы и возмущающим воздействием.
Одной из основных динамических характеристик систем регулирования является ее устойчивость. Под устойчивостью понимается свойство системы возвращаться к состоянию, равновесия после устранения возмущения, нарушившего указанное равновесие. Таким образом, устойчивость или неустойчивость системы определяется характером ее свободного движения после снятия возмущения.
Свободное движение системы описывается однородным дифференциальным уравнением (без правой части):
 (12,75)
(12,75)
Рассматривая решение этого уравнения Хвых(t) = Хвыхс (t) как отклонение регулируемого параметра от заданного значения во времени, естественно потребовать, чтобы в устойчивой системе -го отклонение с течением времени стремилось к нулю:

Проанализируем возможные случаи решения уравнения (12.75) Характеристическое уравнение дифференциального уравнения (12.75) будет иметь вид:

где р1, p2, ..., рn— корни этого уравнения.
Предположим, что все корни уравнения (12.77) вещественные и различные. Тогда решение дифференциального уравнения (12.75) будет иметь вид

где Аi—постоянные интегрирования, определяемые параметрами системы и начальными условиями; рi—корни характеристического уравнения.

Если все корни рi характеристического уравнения будут отрицательными, то каждая составляющая в выражении (12.78) при t, стремящемся к бесконечности, будет стремиться к нулю (рис. 12.9,а).
Если среди корней характеристического уравнения будет хотя бы один вещественный положительный корень, то соответствующая составляющая в выражении (12.78) при t, стремящемся к бесконечности, будет неограниченно возрастать. Следовательно, и все выражение (12.78) будет стремиться к бесконечности (рис. 12.9,б).
При наличии пары комплексных корней характеристического уравнения (12.77) рi=-σi+jωi, в правую часть выражения (12.78) будет входить составляющая

где Аi—начальная амплитуда; φi—начальная фаза.
Если вещественная часть этих корней будет отрицательной, то при t, стремящемся к бесконечности, эта составляющая будет убывать по закону затухающих гармонических колебаний (рис. 12.9,в), Следовательно, и все выражение (12.78) будет стремиться к нулю.
Если вещественная часть этих корней будет положительной, то при t, стремящемся к бесконечности, эта составляющая будет возрастать (рис. 12,9,г). Следовательно, и все выражение (12.78) будет стремиться к бесконечности.
Если среди корней характеристического уравнения (12.77) будет хотя бы одна пара комплексных корней с вещественной частью, равной нулю (мнимые корни), то в выражении (12.78) появится составляющая вида

Следовательно, переходный процесс будет иметь характер незатухающих колебаний (рис. 12.9,д).
Из рис. 12.9 следует, что условие (12.76) удовлетворяется только в том случае, если корни характеристического уравнения (12.77) имеют отрицательные вещественные части.
Таким образом, требование устойчивости системы автоматического регулирования сводится к условию отрицательности вещественных корней характеристического уравнения, а анализ системы автоматического регулирования на устойчивость—к определению знака этих корней.
КРИТЕРИИ УСТОЙЧИВОСТИ
Для определения знаков корней необходимо решить характеристическое уравнение системы. Однако решать алгебраические уравнения высоких порядков затруднительно. Поэтому при определении знаков корней, а следовательно, и при анализе систем на устойчивость используют специальные критерии, позволяющие, не прибегая к решению характеристического уравнения, установить устойчивость системы.
В 1895 г. швейцарский математик Гурвиц опубликовал работу, в которой изложил алгебраический критерий устойчивости, получивший впоследствии название критерия Гурвиц а.
Пусть характеристическое уравнение системы имеет вид:

Критерий Гурвиц а. Согласно этому критерию, все корни характеристического уравнения системы имеют отрицательные вещественные части (система была устойчивой) только в том случае, если определители Гурвица при ао>0 положительны.
Главный определитель Гурвица составляется следующим образом. По главной диагонали записываются все коэффициенты характеристического уравнения в порядке возрастания индексов, начиная с а1. Над каждым элементом главной диагонали определителя записываются коэффициенты того же характеристического уравнения в порядке возрастания индексов, а под каждым элементом — коэффициенты в порядке убывания индексов. На местах коэффициентов с индексами меньше 0 и больше n ставятся нули.
Главный определитель Гурвица имеет вид


В 1938 г. А. В. Михайлов предложил частотный критерий, который также исходит из характеристического уравнения замкнутой системы. Этот критерий обладает большой наглядностью в силу его простой геометрической интерпретации.
Пусть характеристическое уравнение замкнутой системы имеет вид

Будем задавать значения ω в пределах от 0 до ∞. Для каждого значения получим на комплексной плоскости вектор с координата  ми Р(ω) и Q(ω), а соединив концы этих векторов плавной кривой, — годограф, который- называется годографом Михайлова. По расположению этого годографа можно сделать вывод об устойчивости или неустойчивости системы.
ми Р(ω) и Q(ω), а соединив концы этих векторов плавной кривой, — годограф, который- называется годографом Михайлова. По расположению этого годографа можно сделать вывод об устойчивости или неустойчивости системы.
Критерий Михайлова. Система регулирования устойчива только в том случае, если годограф Михайлова F(jω) при изменении ω от 0 до ∞ проходил последовательно против часовой стрелки n квадрантов комплексной плоскости (n—степень характеристического уравнения). Виды годографов Михайлова показаны на рис. 12.11.


В 1932 г. Найквист предложил критерий, позволяющий судить об устойчивости замкнутой системы по амплитудно-фазовой характеристике разомкнутой системы. Все системы автоматического регулирования замкнутые. С целью исследования такой системы на устойчивость по Найквисту ее условно размыкают и получают разомкнутую систему.

Критерий Найквист а. Если система автоматического регулирования устойчива в разомкнутом состоянии, то для ее устойчивости в замкнутом состоянии необходимо и достаточно, чтобы годограф амплитудно-фазовой характеристики разомкнутой системы при изменении ω от 0 до ∞ не охватывал точку на комплексной плоскости с координатами —1; 0 (рис. 12.13).
Разомкнутая система устойчива в том случае, если она состоит из устойчивых звеньев — апериодических, колебательных и включает не более одного интегрирующего звена.
Если разомкнутая система неустойчива, формулировка критерия более сложна (такую систему мы не приводим). В этом случае, а также при перекрестных обратных связях между звеньями системы, что затрудняет ее условное размыкание, рекомендуется применять другие критерии.





Последнее изменение этой страницы: 2016-08-28
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...