Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ СИСТЕМ АВТОМАТИКИ
Ключников А.Т.
КУРС ЛЕКЦИЙ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
СИСТЕМ АВТОМАТИКИ
Г
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ СИСТЕМ АВТОМАТИКИ
Машины малой мощности:
ГОСТ до 600 Вт;
Электротехнический справочник до 1000 Вт;
Иностранная литература до 1500 Вт.
Машины малой мощности - микромашины
В микромашинах энергия механическая преобразуется в электрическую, а электрическая преобразуется в механическую, как и в машинах большой мощности.
ЗАДАЧА: разобраться с особенностями машин малой мощности:
ОБЛАСТЬ ПРИМЕНЕНИЯ МИКРОМАШИН
v Промышленность
v Транспорт
v Сельское хозяйство
v Бытовая техника
Основные функции:
v Преобразование э/э → мех, и наоборот
v Дистанционное управление
v Контроль положения
v Преобразование механической величины в электрический сигнал (измерение скорости вращения – тахометр)
v Математические операции (sin, cos, дифференцирование, интегрирование, вычислительный комплекс)→используется в военной технике
Различают:
v Машины общего применения, у которых конструкция обычная (статор и ротор) и обычные принципы.
U=220 В 50 Гц м.б. до 10000об; ±110 В; автомобиль 12 В.
ГОСТ 183-74, который определяет основные параметры микромашин:cosφ, η
Микромашины имеют худшие cosφ и η.
v Микромашины автоматических устройств или систем автоматики (исполнительные двигатели следящих систем);
v Информационные машины (тахогенератор- угол поворота α);
v Двигатели гироскопических устройств;
v Электромашинные усилители.
К микромашинам предъявляются особые требования, которые могут оказаться на первом месте: обеспечение времени работы (гироскоп 100с)
ОСОБЕННОСТИ ТЕОРИИ МИКРОМАШИН
На микромашины затраты на производство всегда были больше
1949г. Чечет Ю. С. «Электрические микромашины».
Кроме общей теории необходимо учитывать:
v Другое соотношение параметров машины (параметры схемы замещения)
В микромашинах активное сопротивление статора учитывают
v Iх.х. →100%
v Малое насыщение стали обусловлено требованием линейности характеристик
v Потери в стали→0 (потери меньше)
v Плотность тока велика (сечение меньше, акт. сопр-ие ↑), η↓(нагрев обмотки)
v Малое число пазов (появление пространственных гармоник)
Методы, используемые при проектировании:
1. Метод симметричных составляющих
Однофазная система питания; 2 обмотки. Поэтому в этом методе существует прямое и обратное поле, напряжение питания и токи имеют прямую и обратную последовательность. Имеется 2 круговых поля, расчет производится дважды
2. Метод двух реакций
Вектор раскладывается на две проекции, система координат d,q; оси α,β. По каждой оси принцип взаимодействия аналогично трансформатору.
3. Метод вращающихся полей
Существует многофазная система, тогда можно считать, что имеется 3 1-фазных машины. Каждая из этих машин имеет прямую и обратную последовательность токов и магнитных полей.
ОСНОВЫ ТЕОРИИ ДВУХФАЗНЫХ И ОДНОФАЗНЫХ МИКРОМАШИН
1-фазная машина - 1 фаз. питание (м/м б. 1 или 2 обмотки)
Если 2 обмотки м.. 1 или 2 ист. питания
Обмотка А – рабочая;
Обмотка В – пусковая (обеспечение пуска);
Двигатель совместно с источником питания обеспечивает какой-то режим. Симметричный р.р или нет? От чего это зависит?
Симметричная машина:
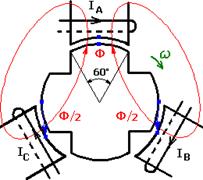
v Плоскости двух обмоток в пространстве под углом 900 (р=1), если р>1 то 90 эл. градусов
v Wа=Wв – число витков
v Nza=Nzb – равенство занимаемых пазов
v Провод одного диаметра (равенство акт. сопротивлений)
v Число пазов одинаковое (равенство акт., инд. сопр. в схеме замещения)
На практике используются несимметричные машины
v 2- фазная система питания симметричная – 2 источника энергии (2 вектора)
v фазовый сдвиг 900
v равенство амплитуд
На практике напряжение несимметричное.
v Симметричный двигатель + несимметричное напряжение = эллипт. поле
v Несимметричный двигатель + симметричное напряжение = эллипт. поле
v Несимметричный двигатель + несимм. напряжение = круговое поле
ПУСКОВОЙ ВРАЩАЮЩИЙ МОМЕНТ
 На линейном участке кривой намагничивания сила взаимодействия ≡I2.Большинство микромашин ненасыщенно.
На линейном участке кривой намагничивания сила взаимодействия ≡I2.Большинство микромашин ненасыщенно.
Если перейти к намагничивающим силам, то момент ≡ намагничивающим силам в квадрате М=С(F12- F22)
F1- прямая последовательность кругового поля
F2- обратная последовательность кругового поля
Для прямой последовательности
 |
Θ-угол, учитывающий пространственный сдвиг обмоток;
β – временной сдвиг токов (МДС)
 |
Для обратной последовательности
 |
С1- коэффициент пропорциональности
ВЫВОДпусковой момент ≡ произведению амплитуд намагничивающих сил двух обмоток и произведению синусов углов Q и b .
1)Iв=0, Мпуск=0
при отсутствии тока в одной пусковой обмотке, момента пускового нет.
2) Θ=0, sinΘ=0 180 не м.б.
Если обмотки не сдвинуты в пространстве, то Мпуск=0
3) β =0, sin β =0 180 не м.б должно быть β, Θ>0
4) Чем больше Fam, Fbm; Θ=0, β=90 => Мпуск максимальный. На практике при пуске β≠90, а угол Θ заложен в конструкции (как правило,90).
Магнитное поле будет эллиптическим.
СХЕМЫ ЗАМЕЩЕНИЯ
Наибольшее применение нашла Т-образная схема, в которой есть сопротивления статорной обмотки, сопротивления намагничивающего контура, сопротивления роторной цепи X'2 и R'2/S.
Имеем две машины. Если ротор крутится в одну сторону, сопротивление ротора обратной последовательности будет другим. Токи в роторе 1ой машины и 2ой будут  различны, т.к. разные частоты, разные скольжения ротора по отношению к магнитному полю машины. (Одинаковое напряжение и токи прямой и обратной последовательности, для них одинаковые графики)
различны, т.к. разные частоты, разные скольжения ротора по отношению к магнитному полю машины. (Одинаковое напряжение и токи прямой и обратной последовательности, для них одинаковые графики)
no-скорость вращения магнитного поля прямой последовательности;
– no-скорость вращения магнитного поля обратной последовательности;
1 - Ммах за счет действия магнитного поля прямой последовательности;
2 - Ммах за счет действия магнитного поля обратной последовательности;
3 - начало пуска, n=0 , S=1
4 - начало пуска, разгона.
Частота ротора f2=f1·S; Сопротивления прямой последовательности R2/S;
обратной последовательности R2/2-S;
Схемы замещения на основе четырех уравнений (*), с учетом сопротивлений ротора, получаем 4 схемы замещения.

Схемы 1 и 2 – схемы замещения обмоток А и В для прямой последовательности
Схемы 3 и 4 – схемы замещения обмоток А и В для обратной последовательности
1-ая схема - сопротивления для обмотки А для прямой последовательности статорной обмотки, активное сопротивление для обмотки В могут быть другим
2-ая схема – учитывает конденсатор, включенный с обмоткой В
RBS- активное сопротивление обмотки В статорной обмотки
Эти схемы позволяют рассчитать момент.
Сопротивления статорной обмотки для прямой и обратной последовательности одни и те же. Для обратной последовательности сопротивление ротора будет другим.
В каждой схеме замещения произведение тока на сопротивление дает напряжение. В микромашинах пользуются сопротивлениями ZA1 и ZA2 как сопротивлениями Т-образной схемы.

ZA1 зависит от скольжения, активное сопротивление зависит от скольжения

Сумма напряжений прямой и обратной последовательностей обмотки А дает реальное напряжение обмотки А 
При нахождении сопротивления обмотки В необходимо учитывать емкостное сопротивление

********************************24.02.2005*******************************
УРАВНЕНИЯ ТОКОВ
Напряжение, которое подводится к обмотке А состоит из прямой и обратной последовательности

Задача найти токи, если известно напряжение питания и сопротивления
Учитывая, что:

Второе уравнение умножим на j∙k:

Ток в обмотке состоит из прямой и обратной последовательности:

Для обмотки В реальный ток:

Достаточно рассчитать токи обмотки А прямой и обратной последовательности, чтобы найти ток обмотки В.
Двигателя и его особенности.
Для пуска используются две обмотки , а после разгона пусковая обмотка отключается.
Рабочая обмотка А крутит машину, в ней создается пульсирующие поле, которое можно разложить на две одинаковые составляющие. Пуск с помощью одной обмотки нее возможен.
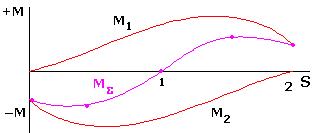
Характеристики для прямого и обратного поля

Зона, в которой работает однобмоточный двигатель МS<M1
т.а соответствует режиму холостого хода, когда Мсопр=0
в т.а есть скольжение
Максимальный момент зависит
v от активного сопротивления статора,
v от активного сопротивления ротора R2

Можно увеличить сопротивление роторной цепи, что Sк > 1 для прямой и обратной последовательности.
Если мы толкнем двигатель, то он не будет раскручиваться, т.к.Sк > 1,т.к. М<1, S>R, результирующий момент тормозит.
**************************03.03.2005*******************************
Режим Х.Х

Х- активные и индуктивные сопротивления они одинаковы
Прямая последовательность
Ток по пунктирной линии протекать не будет, т.к. сопротивление в роторной цепи большое R/0 .А ток идет по пути наименьшего сопротивления.
Обратная последовательность
Сопротивление намагничивающего контура на порядок отличается от сопротивления в статорной обмотки. Сопротивление роторной цепи R/4. Главный ток пойдет через активное сопротивление, напряжение обратной и прямой последовательностей отличаются на порядок. Ток х.х.в схеме прямой последовательности возрастает в 2 раза, за счет двойки в хmA/2.
Т.к. отличаются напряжения ,то мощности тоже отличаются в  раз
раз
Опыты Х.Х и К.З.
К.З.- ротор не подвижен, магнитные поля обмоток взаимно перпендикулярны и взаимного влияния друг на друга не оказывают (включены два трансформатора)
В опыте К.З. можно определить Z

В опыте IAK нужно снизить до Iном
В схеме должны быть ваттметром, амперметром, вольтметром.
Для неподвижного ротора можно определить
коэффициент мощности


RA входят два сопротивления : статора и ротора, приведенного к статорной обмотке

Х.Х. Момент сопротивления должен быть =0. К обмоткам подводим двухфазное напряжение (конденсатора нет) с фазным сдвигом 90°
Фазовый сдвиг легко получить.
К обмотке А UA. К обмотке В подводят линейное напряжение UBC.
Должны быть приборы амперметр, вольтметр, ваттметр в каждой фазе. Мощности (показания ваттметров) должны быть одинаковы в фазах.
PAO= PBO
Подводимое напряжение и токи разные.
Если UA больше в k раз, то ток в обмотке меньше в k раз.
Можно определить

По схеме замещения можно найти сопротивление рассеивания, полное сопротивление, активное сопротивление.
Активное сопротивление R1+Rэст
Rэст - эквивалентное сопротивление потерь в стали, включается последовательно с xm
**************************17.03.2005*******************************
АД с пусковым сопротивлением
Сопротивление последовательно включают с обмоткой В.
 Обмотки находятся под углом 90°. Для пуска используются обе обмотки, в режиме разгона замкнут контакт К. После пуска контакт К должен быть разомкнут - контакт пускового реле замыкается при большом пусковом токе. Обычно у таких двигателей сопротивление обмотки разное, коэффициент трансформации k≠1.
Обмотки находятся под углом 90°. Для пуска используются обе обмотки, в режиме разгона замкнут контакт К. После пуска контакт К должен быть разомкнут - контакт пускового реле замыкается при большом пусковом токе. Обычно у таких двигателей сопротивление обмотки разное, коэффициент трансформации k≠1.
ХSA> ХSB Индуктивное сопротивление обм.А больше ,т.к. число витков в
RSB> RSA обм.А в 2 раза больше. Обм.А является рабочей, после пуска ток
снижается и К размыкается.
 Количество пазов на обм. А и В может быть разное, сечение проводов различное. Обм.В работает кратковременно Þ плотность тока можно сделать больше Þ активное сопротивление может оказаться больше RSB> RSA .Конструктивно сечение паза обм.А больше, чем обм. В.
Количество пазов на обм. А и В может быть разное, сечение проводов различное. Обм.В работает кратковременно Þ плотность тока можно сделать больше Þ активное сопротивление может оказаться больше RSB> RSA .Конструктивно сечение паза обм.А больше, чем обм. В.
В длинные пазы укладывается обмотка А, пазы чередуются А-В-А-В.
В режиме пуска пусковой ток IK состоит из 2ух токов IАK и IВK.
IK пусковой ток не трехкратный, а гораздо больше, т.к. фазосдвигающий угол небольшой.
 Строим В.Д. (векторную диаграмму) для режима пуска.
Строим В.Д. (векторную диаграмму) для режима пуска.
U – напряжение питания. В обмотке А 2 сопротивления активное и индуктивное
IAK индекс К означает неподвижный ротор. Фазовый сдвиг обмотки В меньше , чем у обмотки А
Момент пропорционален намагничивающим силам

Q- неизменная величина для двигателя
Повлиять на ток обмотки а мы не можем

Если меняем активное сопротивление Rд и сопротивление R ,фазовый сдвиг и длина вектора будут меняться . В т. С активное сопротивление в обмотке В =0. Длина вектора будет меняться.
Пусковой момент пропорционален отрезку ab. Если из центра окружности провести под 90° к IAK получим максимальный отрезок ambm .
Максимальный пусковой момент пропорционален  ,тогда ток пусковой может достигать <9 IAН.
,тогда ток пусковой может достигать <9 IAН.
Номинальный ток протекает по обмотке А IAН ,а IAK=3 IAН.
Пусковые свойства характеризуются добротностью двигателя
 желательно иметь максимальный sina .
желательно иметь максимальный sina .
С помощью векторно-круговой диаграммы можно анализировать пусковые свойства, рабочие свойства с различными фазосдвигающими устройствами.
Сопротивление ХВК в обмотке В будем уменьшать, ток уменьшается, фазовый сдвиг увеличивается, отрезок ambm возрастает, МК можем получить больше.
Если ↑ ХАК ,↑fА,↑ ambm ,↑ МК.

МК=1-1.5
h=0.5
cosfН=0.5
Дополнительное сопротивление из формулы

АД с пусковым конденсатором
Схема та же самая, только вместо Rд включают конденсатор. В процессе пуска работают 2 обмотки, затем пусковое реле отключает обмотку В. Пусковой конденсатор лучше, чем пусковое сопротивление, т.к. создает больший пусковой момент.
 Обмотка А занимает ⅔ пазов, а обмотка В ⅓ пазов. обмотка В работает кратковременно. Пусковой ток должен быть <5 IНОМ.
Обмотка А занимает ⅔ пазов, а обмотка В ⅓ пазов. обмотка В работает кратковременно. Пусковой ток должен быть <5 IНОМ.
Для кругового поля в начале пуска коэффициент трансформации между обмотками.

Из В.Д. следует

Чтобы ХС> ХB нужно поставить маленькую емкость, иначе получим резонанс.
Добротность 
 Получим хороший пусковой момент. Верхняя хар-ка – разгон с помощью 2 обмоток. В т.а отключают обмотку В.
Получим хороший пусковой момент. Верхняя хар-ка – разгон с помощью 2 обмоток. В т.а отключают обмотку В.
т.А рабочая точка МНОМ. Конденсатор отключен, его нельзя использовать в режиме нагрузки.
Недостаток
1.невысокая надежность контактного реле
2.большие пусковые емкости
При расчете необходимо учитывать ,как уйти от 3ей гармоники- делают укорочение обмотки.
 Не всегда можно добиться высокого пускового момента. В т.а контактное реле размыкается, пусковая емкость отключается, переходим на другую характеристику.
Не всегда можно добиться высокого пускового момента. В т.а контактное реле размыкается, пусковая емкость отключается, переходим на другую характеристику.
АД с пусковым конденсатором
Идея:оставить одну емкость, она меньше пусковой, но больше рабочей.
Большее значение рабочей емкости нужно тогда, когда момент пусковой увеличиваем. Получим точку при круговом поле. При большем скольжении S>SH поле эллиптическое. КПД может уменьшится за счет эллиптического поля при номинальном скольжении.
Графики с различными конденсаторами
 Эта механическая характеристика в случае 2ух фазного питания, без конденсатора.
Эта механическая характеристика в случае 2ух фазного питания, без конденсатора.
U должно быть с фазовым сдвигом 90°.
Эти характеристики когда всегда есть круговое поле.
1 S=1 круговое поле.
Можно подключить этот двигатель к однофазному источнику, тогда в обмотке B включают конденсатор.

В процессе разгона новая характеристика
ток в обмотке B нарастает, а в обмотке A спадает.
На характеристике ток в обмотке B и A спадает.
Слева от S0 поле эллиптическое.
Возьмём S=0.6 создадим круговое поле получим характеристику  S0=0.6.
S0=0.6.
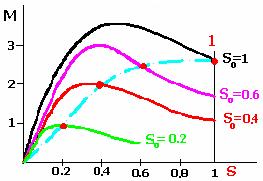
Построим зависимость моментов и токов для различных круговых скольжений (S0)

SH=0.1 для номинальных режимов рассчитано круговое поле.
Нижняя точка  соответствует токам в обмотке A и обмотке B токи равны.
соответствует токам в обмотке A и обмотке B токи равны.
 IH – векторная сумма 2х токов.
IH – векторная сумма 2х токов.
IS – статорный ток (сетевой ток)
Возьмём S=0.2 получаем 4 тока.
при S=0.2 посчитаем конденсатор, когда круговое поле.
Ток в обмотке B возрастает, а в обмотке A уменьшается.
С увеличением ёмкости разность XB-XC уменьшается, а ток должен возрастать Þ можно получить резонанс. Общий потребляемый ток IS возрастает можно получить большой момент.
Круговое скольжение при S=0.2 момент меньше, при S=0.1 момент больше.
Силовые синхронные двигатели
У синхронного двигателя скорость вращения ротора определяется частотой и числом пар полюсов f=50Гц=const, n=max=3000 об/мин, p>>1.
классификация по конструкции:
1.статор 2х,3хфазный. Две обмотки создают круговое магнитное поле (но может быть эллиптическое, когда однофазный источник питания).
2.ротор имеет электромагнитную обм. возбуждения
ротор с постоянными магнитами,
реактивный ротор(Хd≠XqÞпоявляет синхронный момент)
гистерезисный двигатель.
Есть двигатели тихоходные СД с электромагнитной редукцией.
двигатель с катящимся ротором (ротор «обвалакивает статор»)
Основные требования : хороший КПД, cosf, минимальная масса.
Из особенностей СД постоянство скорости вращения на одном обороте.
Основные уравнения микроСД.
Хd – индуктивное сопротивление по продольной оси d, зависит от величины потока по оси d. Состоит из двух частей 
Хad – индуктивное сопротивление взаимоиндукции (в крупных СД Хm)/
X1 – индуктивное сопротивление рассеяния.
Xq – индуктивное сопротивление по оси q.

Хad≠ Хaq, не всегда равны.
В крупных СД ХadPХaq, в микро СД ХdOХq.
Только для крупных СД  ,
,
у реактивных двигателей Ео=0.
В машинах малой мощности учитываем активное сопротивление статорной обмотки.
В общем случае напряжение питания уравновешивается падением напряжения на активном сопротивлении статорной обмотки, на сопротивлениях Хd и Xq и уравновешивается Е засчет магнитного поля ротора (могут быть обмотка возбуждения или постоянные магниты).

Id и I q – проекция искусственного тока на ось d и q.
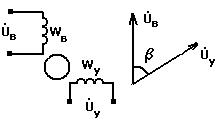
Векторная диаграмма при Ео<Uпит
х.х. Мсопр=0, Рпотр=0, тогда I=0, Е=U,
тогда
 , где If – ток возбуждения. Минус связан с направлением If, который направлен по –d. Засчет If уменьшается Id.
, где If – ток возбуждения. Минус связан с направлением If, который направлен по –d. Засчет If уменьшается Id.

Угол Qи к микроСД получается меньше, т.к. в крупных СД сопротивление RS отсутствует.
Найдем проекции напряжения на оси d и q.
Получаем

Для нахождения токов необходимо знать U,E. Тогда задаваясь Q (от 0 до 360) можно построить зависимость тока статора от Q.
Решаем систему с двумя неизвестными Id и Iq.

После нахождения проекций тока, находим реальный ток статора 
Определяем мощность, потребляемую статорной обмоткой.


Через воздушный зазор поступает мощность, которая меньше на величину потерь.

DPвозб=0 если постоянные магниты.
DPЭЛS – электрические потери в статоре.

Расчетная характеристика
Влияние угла Q на ток статора.
Положение ротора фиксируется, и угол Q сохраняется, величина тока меняется.
Конец вектора тока изобразит кривую годограф.

Построим ток х.х.(Im), когда Ео=0.
Угол между U и Im <90° ,т.к. есть активное сопротивление статорной обмотки. Если его не учитывать, то угол 90° , а ток равен 
Im состоит из двух проекций; используем метод суперпозиции.
Определяем ток, U=0, ЭДС Ео, Хd= Xq, это будет окружность для любого угла Q.
В осях d q Хd= Xq
 В осях ab годограф имеет другой вид.
В осях ab годограф имеет другой вид.
СДМ и асинхронным пуском.
Статор состоит из 2х,3х обмоток, которые создают вращающиеся магнитные поля: круговое или эллиптическое. На роторе К.З. клетка для асинхронного пуска. Эта клетка для демпфирования колебаний синхронных скоростей.
На роторе постоянные магниты. Между полюсами существуют немагнитные вставки. На постоянные магниты надевается кольцевой пакет из электротехнической стали.ÞГлавная функция – защита от магнитного потока статора. Глубина проникновения электромагнитного поля зависит от частоты токов ротора и m стали. Постоянными магнитами обеспечиваем слабое размагничивание.

В асинхронном режиме S≠0, ширину прорези D желательно иметь меньше.
В синхронном режиме S=0, D>d. Если D мало, то магнитные силовые линии замкнуться (см. ---- линию).
Магнитное сопротивление по оси d Rmd>RmqÞ магнитный поток по оси d меньше, чем по оси q. Это обусловлено значением m постоянных магнитов m=10.
В этой машине Хd< Xq. Имеется момент пропорциональный sinQ со знаком «+» и реактивный момент пропорциональный sin2Q со знаком «-».Это связано с Rmd>Rmq.
Гистерезисные двигатели.
Статор – обычный 2ух фазный или 3х фазный. Могут быть 2 обмотки, целесообразнее 1 фазный источник питания.
Ротор - вращается часть сплошной (1 болванка) или полый, собранный из штампованных дисков специальной электротехнической стали.
Если полый – быстродействие лучше, быстрее разгоняется.
Материал для ротора – викалой (Fe, Co, ванадий), альний (Al, Fe, Ni). Эти материалы относятся к материалам с широкой петлей гистерезиса. Ширина петли гистерезиса характеризует энергию, которая нужна для перемагничивания за 1 цикл, существует остаточная индукция (≈0.5 Тл).
Используются принципы постоянного магнита, в асинхронном режиме направление магнитного поля в роторе постоянно меняется.
синхронный режим

Сила взаимодействия полей по диаметру. МС=0, Мэм=0.
NS на роторе – остаточная индукция
асинхронный режим
 В режиме пуска (разгона) центры магнитных полей не совпадают.
В режиме пуска (разгона) центры магнитных полей не совпадают.
F – эквивалентные силы взаимодействия полей
За счет тангенсальной составляющей возникает электромагнитный момент. В процессе разгона ротор вращается медленнее. Как только ротор отстал от магнитного поля статора, происходит изменения поля.
Ротор перемагничевается на глубину проникновения электромагнитного поля.
Проводимость этих материалов намного хуже, т.е. токи на поверхности не велики Þ SН>1.
Асинхронный момент есть, но в сравнении с гистерезисным моментом (основным) он мал.
гистерезисный момент  .
.
угол Q характеризует положения центров магнитных полей ротора.
 Рпг – энергия электромагнитная
Рпг – энергия электромагнитная
Рассмотрим пуск: S=1, 
РГ – удельные потери на единицу V
V – объем
 - потери на перемагничивание за 1 цикл
- потери на перемагничивание за 1 цикл
р – пары полюсов
Гистерезисный момент не зависит от частоты. Если V=const, то МГ=const.
 nc тока синхронного момента. МГ=constÞ характерные пусковые данные
nc тока синхронного момента. МГ=constÞ характерные пусковые данные
cosf=0.5(слабое место).
Мощности двигателей могут быть >100Вт.
Главное преимущество – массивный ротор может вращаться на больших оборотах, но большого применения не получили.
Шаговый двигатель.
Шаговый двигатель с редукцией (понимающий).
По конструкции очень похож на индукторный, статор многофазный, ротор реактивный, если есть зубцы, но в пазы могут быть заполнены постоянные магниты, тогда ротор активный.
Имеется электронный коммутатор, число транзисторов совпадает с числом фаз (число обмоток).
Питание обмотки от постоянного источника, однополярное напряжение. К обмотке по очереди подаются импульсы, прямоугольный ток с фазовым сдвигом. Угол проводимости транзисторов l=180о и более, характеризует время включенного транзистора.
**************************07.04.2005*******************************
Временные диаграммы m=3, l=180о., три полюса ZR>ZS , ZR=4
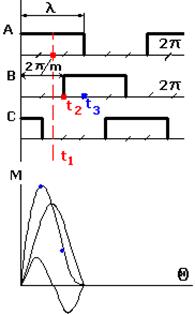 Возьмем точку времени t1, тогда ток пропускаем по одной обмотке, зубец статора совпадает с зубцом ротора.
Возьмем точку времени t1, тогда ток пропускаем по одной обмотке, зубец статора совпадает с зубцом ротора.
В t1 ток протекает по обмотке А, возникает магнитное поле Ф. Положение ротора определяет тот полюс, где есть магнитное поле.
В t2 появляется ток в обмотке В. Ротор разворачивается на какой-то угол, центр магнитного поля сместится.
 В t3 ток протекает только по обмотке В. Центры магнитных полей статора и ротора будут напротив друг друга.
В t3 ток протекает только по обмотке В. Центры магнитных полей статора и ротора будут напротив друг друга.
Угол Q определяется положением магнитных полей (это статика).
 В динамике есть зависимость момента от частоты импульсов. В паспорте
В динамике есть зависимость момента от частоты импульсов. В паспорте  даются данные номинальной частоты, при этом момент будет меньше, чем при частоте 0. Есть предельная частота 330 Гц, когда двигатель не создает вращающего момента. При этом момент сопротивления 0, за время действия импульса ротор не успевает развернуться. При этом нежно учитывать переходные процессы цепи RL, где ток нарастает по экспоненте. Для увеличения частоты включают последовательно с обмотками сопротивления. При этом КПД преобразователя-коммутатора падает.
даются данные номинальной частоты, при этом момент будет меньше, чем при частоте 0. Есть предельная частота 330 Гц, когда двигатель не создает вращающего момента. При этом момент сопротивления 0, за время действия импульса ротор не успевает развернуться. При этом нежно учитывать переходные процессы цепи RL, где ток нарастает по экспоненте. Для увеличения частоты включают последовательно с обмотками сопротивления. При этом КПД преобразователя-коммутатора падает.
Главное в шаговом двигателе – точность поворота вала. За один шаг поворот достигает Da=1о-15о, у некоторых доли градусов.
Шаговые двигатели часто работают совместно с гидроприводом. Есть обратная связь.
!Двигатель с волновым ротором (самостоятельно)
Вентильный двигатель.
В вентильном двигателе катушки вращаются, а полюса неподвижны, по конструкции МПТ.
Вентиляторы используются БДПТ, р=2, частота плавно нарастает, 4 обмотки распределены по диаметру, равноценно 2 обмоткам. Время работы l=180о. Фазовый сдвиг между ними 90о.Один ток исчезает, другой появляется, нет перекрытия. Есть точка, когда М=0 (мертвая зона).
Выход из этого:
- скос паза;
- дополнительный момент, который выводит из этого положения
- неравномерный воздушный зазор.
Исполнительные микродвигатели.
Исполнительный микродвигатель преобразует электрический сигнал (напряжение U или фаза f) в механическое перемещение (вращение вала).
Особенности этих двигателей:
- частые пуски (I>IН), при этом скорость вращения<номинальной
- частые реверсы
- есть пауза для остановки
- нет самовентиляции, скорость мала; закрытые
- небольшой мощности, имеют 2 обмотки
требуется быстродействиеÞ момент инерции следует уменьшить.
Основные требования:
1. самоторможение при снятии сигнала управления (отсутствие самохода)
2. линейность механической и регулировочной характеристик
3. большой пусковой момент
4. малая мощность управления
5. малое напряжение трогания – минимальное напряжение, при котором начинается вращение. Если напряжение трогания мало, то можно получить большой диапазон регулирования по скорости.
6. надежность определяет количество часов в определенных рассчитанных условиях
КПД этих двигателей ниже за счет скорости на пуске.
Основы теории АИД.
Способы подачи напряжения были разобраны
U/B отличается от UB в К раз. К- коэффициент трансформации.

ZB1 – сопротивление обмотки В для прямой последовательности.


Для обратной последовательности все сопротивления те же, кроме сопротивления ротора.
……………………………………………………………………………..
Для однообмоточного двигателя были получены выражения токов.
Учтем, что вместо буквы А пишем У.
Напряжение U/B заменим, тогда в числителе останется только напряжение управления. После преобразования получим


Нарисуем годограф напряжений прямой и обратной последовательности.

Напряжение UУО – максимальное значение напряжения управления.
a=1 b=90о
UУО – дает возможность получить круговое магнитное поле.
Ротор будет вращаться с той же скоростью, что и магнитное поле – максимальная скорость. В процессе управления угол b можно уменьшать от 90 до 0 и скорости будут ниже в режиме х.х.
С напряжением UУ скорость вращения ротора снижается.
Преобразуем уравнения:
 Зная коэффициенты К1 и К2, можно найти токи прямой и обратной последовательности через токи кругового поля.
Зная коэффициенты К1 и К2, можно найти токи прямой и обратной последовательности через токи кругового поля.
Электромагнитный момент.
Электромагнитный момент состоит из 2ух частей: прямой и обратной последовательности. Момент прямой последовательности определяется с помощью коэффициента К1 и момента при круговом поле.

МS – момент при скольжении S, поле круговое.
МS-2 – момент при скольжении S-2, поле круговое.
 Задаемся скольжение S и определяем момент МS в этой точке; b=90о
Задаемся скольжение S и определяем момент МS в этой точке; b=90о
Точка х.х. зависит от момента прямой и обратной последовательности.
Участок от 0 до 1 – прямая линия.

Три зоны, пунктирная не используется, т.а – режим х.х.. S от 1 до т.а. При другом соотношении моментов т. а и т.в. перемещаются. т.В – пусковой момент.
Информационные микромашины
 Тахогенераторы постоянного тока. Есть зависимость E=C·Ф·n
Тахогенераторы постоянного тока. Есть зависимость E=C·Ф·n
Тахогенераторы c постоянными магнитами; должны проводить тарирование-проверка по номинальной скорости, т.к. постоянные магниты имеют свойство размагничиваться.
Синхронный тахогенератор. E=4.44·f·W·Фm·Kоб. С изменением оборотов меняется и частота. Вольтметр эквивалентен активно-индуктивной нагрузке. Внутреннее сопротивление генератора зависит от частоты.
Электронные тахогенераторы. Количество импульсов на 1 обороте - 360.
Цифровые тахогенераторы. Цифровые и электронные тахогенераторы измеряют с высокой скоростью, ошибка на последней цифре.
Асинхронный тахогенератор.
Поворотные трансформаторы.
Сельсины.
Требования к тахогенераторам (ТГ)
ТГ – преобразователь механического перемещения (вращения) в электрический сигнал (выходное напряжение).
Линейность выходной характеристики (U=f(ω)), характеристика должна выходить из 0;
Uг=k*n=k*dα/dt Эти уравнения говорят о том, что ТГ может использоваться для:
Последнее изменение этой страницы: 2016-08-29
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...