Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Расчет механических характеристик асинхронного двигателя в режиме динамического торможения.
Вывод формулы механической характеристики динамического торможения асинхроного двигателя проводится по законам и формулам асинхроной машины, заменив постоянный ток, подаваемый в статор , на эквивалентный по М.Д.С. трехфазный ток. Такая замена основана на том, что в момент пуска двигателя вращающегося с синхронной частотой магнитное поле статора пересекает проводники неподвижного ротора; при динамическом торможении тоже по формуле поле неподвижно, но вращающейся ротор и при его синхронной частоте вращения происходит также пересечение поля проводниками ротора. Сравнимые режимы будут и при других частотах вращения ротора, считая числено равными скольжение в режиме двигателя S и относительную частоту вращения в режиме динамического торможения ώ*.
Для равенства эквивалентного двигательного тормозного момента должны быть равны М.Д.С., создаваемые постоянным и эквивалентным переменными токами.
|

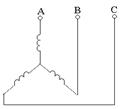
Из этого условия определяются соотношение между эквивалентным Iэкв и постоянным Iпост токами. Для наиболее распространенной несимметричной схемы соединения обмоток статора, изображенной на рис.1 указанное соотношение имеет вид:
Iэкв=0,816Iпост.
В основу расчета механических характеристик динамического торможения асинхронного двигателя положим три ниже приведенные зависимости, позволяющие учесть изменение магнитного потока по кривой намагничивания, изменение реакции ротора и изменение реактивного сопротивления ротора от частоты вращения.
|

1.Приведенный к статору ток ротора найдется из схемы замещения рис.2
 . (1)
. (1)
2. Связь между токами статора и результирующим током намагничивания найдем из векторной диаграммы асинхронного двигателя в режиме динамического торможения рис.3.
|

 ,
,
откуда
 . (2)
. (2)
3. Момент двигателя, как известно, пропорционален электрическим потерям в роторе:
 (3)
(3)
Отметим, что реактивное сопротивление цепи намагничивания, определяемое результирующим током двигателя, меняется при динамическом торможении, так как меняется ток намагничивания:
 (4)
(4)
Подставляя в (2) значение:

и производя ряд преобразований получаем расчетные выражения:
для относительной частоты вращения:
 ; (5)
; (5)
для приведенного тока ротора:
 ; (6)
; (6)
для электромагнитного момента:
 . (7)
. (7)
Расчет механических характеристик двигателя в режиме динамического торможения удобно вести с помощью вспомогательных таблиц.
Из выражения (5) найдем отношение, которое входит в последующие равенства:
 , (8)
, (8)
а относительная частота вращения будет определятся,
 . (9)
. (9)
Порядок расчета.
Расчет оформляется в виде таблицы.
| Общие данные | 
| |||||||||
| Кривая намагничивания | Вспомогательные расчеты | Искомые характеристики | ||||||||

| 
| 
| 
| 
| 
| 
| 
| 
| М | 
|
Столбцы 1 и 2 заполняются по кривой намагничивания:
| Кривая намагничивания | ||||||||||
|
| 0,2 | 0,4 | 0,6 | 0,8 | 1,0 | 1,2 | 1,4 | 1,6 | 1,8 | 2,0 |
|
| 0,26 | 0,52 | 0,736 | 0,895 | 1,0 | 1,07 | 1,122 | 1,163 | 1,193 | 1,223 |
Реактивное сопротивление цепи намагничивания определяется как , но поскольку в столбцах 1,2 даны относительные значения, то найдется из выражения:  ,
,
где  - эквивалентный ток статора холостого хода (номинальный ток намагничивания) принимается равным реактивной составляющей тока холостого хода);
- эквивалентный ток статора холостого хода (номинальный ток намагничивания) принимается равным реактивной составляющей тока холостого хода);  - номинальная ЭДС фазы статора.
- номинальная ЭДС фазы статора.
Столбец 5. Эквивалентный по МДС трехфазный ток  определяется по принятому постоянному току возбуждения, который по условию примера принят 3-кратным току холостого хода т.е.
определяется по принятому постоянному току возбуждения, который по условию примера принят 3-кратным току холостого хода т.е.  . Для рассматриваемой схемы включения статорной обмотки согласно рис.1
. Для рассматриваемой схемы включения статорной обмотки согласно рис.1  . Значения берутся из столбца 3.
. Значения берутся из столбца 3.
Столбец 6. Поскольку ток намагничивания в столбце 1 дан в относительных единицах, то и ток статора нужно выразить в относительных значениях к току холостого хода:  , поэтому
, поэтому  , где значения берутся из столбца 1.
, где значения берутся из столбца 1.
Столбцы 7, 9-11 рассчитываются по выражениям (6)-(9), соответственно.
Примеры расчета схемы замещения и характеристик динамического торможения.
Рассчитаем параметры схем замещения трехскоростного асинхронного двигателя для каждой скорости.
4А В2 81614 ОМ2 – предназначен для работы в продолжительном режиме. Регулирование частоты вращения осуществляется переключением числа полюсов. Имеется две независимые обмотки.
1000об/мин – Y; 750/1500 об/мин Δ/ YY
Технические данные:
| 2p | P,кВт | n,об/мин | I, А | ή | cosφ | kI | kп | kM |
| 2,8 | 7,6 | 0,75 | 0,78 | 7,5 | 1,2 | 1,8 | ||
| 2,6 | 7,3 | 0,72 | 0,72 | 7,5 | 1,2 | 1,8 | ||
| 4,5 | 9,8 | 0,9 | 0,9 | 7,5 | 1,0 | 1,8 |
Схемы подключения обмоток.


I скорость 2р=8 II скорость 2р=6 Y III скорость 2р=4 YY
Последнее изменение этой страницы: 2016-08-29
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...