Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
СОЕДИНЕНИЕ ЭЛЕМЕНТАРНЫХ ЗВЕНЬЕВ
Реальные объекты, регуляторы и системы регулирования могут быть представлены как различные соединения элементарных звеньев. Амплитудно-фазовые характеристики таких систем звеньев можно определить по характеристикам отдельных элементарных звеньев.
При последовательном соединении  элементарных звеньев (рис. 1.20, а) с характеристиками
элементарных звеньев (рис. 1.20, а) с характеристиками  характеристика системы
характеристика системы
 .
.
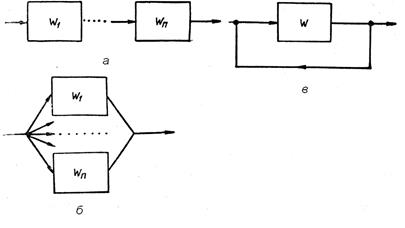
Рис. 1.20. Схемы соединения элементарных звеньев:
а – последовательное соединение; б – параллельное
соединение; в – охват звена обратной
связью
При параллельном соединении звеньев (рис. 1.20, б) характеристика системы
 .
.
При охвате элементарного звена (или системы звеньев) с характеристикой обратной связью (рис. 1.20, в) характеристика замкнутой системы
 .
.
РЕГУЛЯТОРЫ И ЗАКОНЫ РЕГУЛИРОВАНИЯ
РЕГУЛЯТОРЫ РАЗОМКНУТЫХ
СИСТЕМ ЖЕСТКОГО УПРАВЛЕНИЯ
Для создания разомкнутых систем жесткого управления используют реле времени, командо-аппараты, устройства блокировки.
Для создания разомкнутых систем управления по возмущению (систем компенсации) используют обычные серийные регуляторы, предназначенные для замкнутых систем регулирования (раздел 1.4.2).
РЕГУЛЯТОРЫ ЗАМКНУТЫХ
СИСТЕМ РЕГУЛИРОВАНИЯ
В промышленных замкнутых системах автоматического регулирования используют регуляторы непрерывного, релейного и импульсного действия.
В регуляторах непрерывного действия между выходными и входными величинами всех элементов существует непрерывная функциональная связь.
В регуляторах релейного действия величина на выходе одного из элементов (например, положение или скорость перемещения исполнительного механизма и др.) не изменяется при изменении величины на выходе элемента, и лишь знак ее зависит от знака входной величины.
В регуляторах импульсного действия величина на выходе какого-либо элемента представляет собой последовательный ряд импульсов, амплитуда, длительность или частота которых зависят от величины на входе в отдельные, определенные моменты времени.
Основными элементами регулятора являются (рис. 1.21): устройство измерения регулируемой величины – измерительное устройство; устройство для ручного (или автоматического) ввода заданного значения регулируемой величины – задающее устройство; устройство сравнения измеряемого и заданного значений для определения отклонения; управляющее устройство, вычисляющее величину регулирующего воздействия; исполнительное устройство (исполнительный механизм, сервомотор), переставляющее регулирующий орган на входе объекта.
В конкретных случаях отдельные элементы регулятора могут быть совмещены или вовсе исключены.

Рис. 1.21. Основные элементы регулятора: 1 - измерительное
устройство; 2 – задающее устройство; 3 – уст-
ройство сравнения; 4 – управляющее устройс-
тво; 5 – исполнительное устройство; 6 – прис-
пособление для настройки регулятора
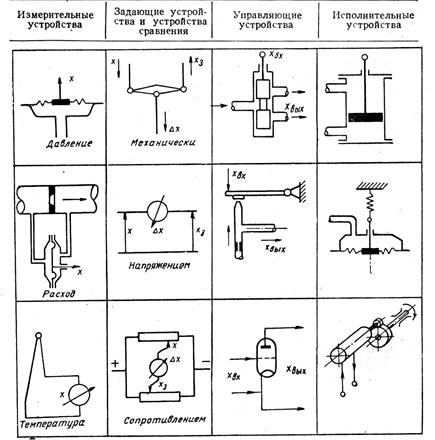
Примеры конструктивного выполнения отдельных элементов регулятора приведены в таблице 1.3.
Регуляторы без исполнительного механизма (без применения вспомогательной энергии), в которых для перемещения регулирующего органа используют усилие, развиваемое чувствительным элементом регулятора, называют регуляторами прямого действия (непосредственного действия). Это усилие невелико и достаточно для перемещения лишь регулирующих органов малых размеров, требующих небольших перестановочных усилий.
Регуляторы с исполнительными механизмами, в которых для перемещения регулирующего органа используется вспомогательная энергия, называются регуляторами непрямого действия. По виду вспомогательной энергии различают гидравлические, пневматические, электрические и комбинированные регуляторы непрямого действия.
Характер работы регулятора определяется законом регулирования (уравнением), по которому он вводит в объект регулирующее воздействие, т.е. связью во времени между отклонением регулируемой величины от заданного значения х (входная величина регулятора) и перемещением у регулирующего органа, которым этот регулятор управляет (выходная величина регулятора).
Формирование закона регулирования в управляющих элементах регуляторов различных конструкций осуществляется
Таблица 1.3
Примеры выполнения элементов регуляторов
по-разному. Этот закон вырабатывается либо непосредственно в “прямом канале» - в линии, идущей от входа к выходу регулятора, либо при помощи различных обратных связей, т.е. сигналов, поступающих в обратном направлении – от выхода регулятора к его входу. Различают жесткую обратную связь, когда сигнал пропорционален выходной величине у, и гибкую обратную связь, когда сигнал изменяется в зависимости от изменения величины у и от времени.
Законы регулирования соблюдаются обычно лишь с известными ограничениями – только в области нормальных
режимов работы промышленного регулятора. Эти режимы определяются частотой процессов регулирования, что связано с динамикой объекта и регулятора.
Работа регулятора при данном законе регулирования зависит от значений постоянных коэффициентов, входящих в его уравнение. Конституция каждого промышленно регулятора позволяет изменять значения этих коэффициентов в достаточно широких пределах. Это дает возможность получать требуемый характер переходного процесса при регулировании на объектах с различными динамическими свойствами и расширяет область применения регулятора данного типа. Поэтому каждый серийный регулятор снабжен специальными приспособлениями для изменения значения коэффициента, т.е. для настройки регулятора по динамическим характеристикам объекта регулирования.
Регуляторы непрерывного действия и их законы регулирования.Эти регуляторы подразделяются в соответствии с законами регулирования (уравнениями) на следующие типы.
Функциональная связь между выходной координатой регулятора y (т.е. регулирующим воздействием или положением регулирующего органа) и его входной координатой х (т.е. отклонением регулируемого параметра от исходного равновесного значения, или рассогласованием) в установившемся движении регулятора (после окончания затухающего переходного процесса, если он существует) называется законом регулирования.
У регуляторов плавного действия эти функциональные зависимости непрерывные (от абсолютных величин и знаков: отклонения, его интеграла и производных)и обычно линейные (чаще прямая пропорциональность).При этом пользуются следующими основными пятью законами регулирования:
1) по отклонению (воздействие функционально связано лишь с величиной и знаком мгновенного отклонения);
2) по отклонению и производным (воздействие связано с величиной и знаком не только мгновенного значения отклонения, но и производных (первой, второй) отклонения по времени);
3) по интегралу (воздействие зависит от величины и знака интеграла отклонения по времени);
4) по отклонению и интегралу ( воздействие зависит от величины и знаков не только отклонения, но и его интеграла по времени);
5) по отклонению, интегралу и производным (воздействие зависит от величины и знаков отклонения, его интеграла и производных по времени).
В соответствии с законами регулирования (уравнениями) эти
регуляторы подразделяются на следующие типы:
Последнее изменение этой страницы: 2016-08-28
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...