Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Глава 1. Радиотехнический канал передачи информации..
Оглавление
Введение......................................................................
Глава 1. Радиотехнический канал передачи информации..
Передающие устройства...........................................
Глава 2. Реальные системы связи
УКВ радиостанции самолетов...........................................................
Коротковолновые радиостанции..............................
Бортовые переговорные и громкоговорящие устройства
Самолетное переговорное устройство СПУ-7............
Самолетное громкоговорящее устройство СГУ – 15 .
Система громкоговорящая самолетная СГС-25.........
Система внешней и внутрисамолетной связи, оповещения
и развлечения пассажиров СПГУ............................
Бортовая аппаратура магнитной записи...................
Магнитофоны МС-61 и МН-61.................................
Магнитофон МАРС-БМ...........................................
Бортовая аппаратура АРФА-МБ..............................
Аппаратура воспроизведения речевых сообщений П-591-Б Техническое обслуживание систем связи самолетов.........
Глава 3. Радиотехнические системы навигации самолетов
Частотный метод измерения дальности......................
Фазовый метод измерения дальности........................
Методы измерения угловых координат......................
Амплитудные методы...............................................
Фазовые методы......................................................
Методы измерения скорости.....................................
Методы определения местоположения объектов..........
Глава 4. Угломерные радионавигационные устройства....
Автоматические радиокомпасы .................................
Автоматический радиокомпас АРК-15........................
Глава 5 Радиотехнические системы средней и дальней навигации А-723...................................................................................
Блок А-723-3...........................................................
Блок А-723-4...........................................................
Блок А-723-5...........................................................
Блок А-723-2 ..........................................................
Блок А-723-7...........................................................
Блок А-723-10..........................................................
Блок А-723-11..........................................................
Глава 6. Бортовая навигационно-посадочная аппаратура «ОСЬ-1»
Параметры категорий систем посадки........................
Курсовая часть системы «ОСЬ-1» в системе СП-50......
Курсовая часть системы «ОСЬ-1» в системе ILS..........
Глиссадная часть системы «ОСЬ-1» в системах СП-50 и ILS Маркерный канал системы ОСЬ-1...............................
Состав и основные технические характеристики системы ось-1
Глава 7. Доплеровские радиолокационные станции для измерения
путевой скорости и угла сноса самолета (ДИСС)
Технические данные системы ДИСС-013.....................
Принцип действия ДИСС-013....................................
Технические характеристики блоков ДИСС-013.........
Глава 8. Радиовысотомеры............................................
Радиовысотомер малых высот...................................
Радиовысотомер РВ-5...............................................
Основные технические данные высотомера РВ-5.........
Радиовысотомер больших высот................................
Глава 9. Самолетные радиолокационные ответчики.........
Радиолокационный самолетный ответчик СО-69.........
Работа с диспетчерскими РЛС..................................
Работа с посадочными РЛС.......................................
Особенности работы наземных радиолокационных станций
Основные характеристики ответчика СО-69...............
Структура ответного сигнала....................................
Изделие А-511........................................................
Глава 10. Радиолокационные визиры.............................
Радиолокатор ГРОЗА................................................
Глава 11. Радиотехнические системы ближней навигации.
Принцип работы системы РСБН.................................
Измерение дальности................................................
Измерение азимута...................................................
Наземная индикация координат самолета...................
Измерение отклонения от курса посадки.....................
Измерение отклонения от глиссады планирования.......
Измерение дальности в режиме ПОСАДКА................
Бортовая аппаратура ближней навигации и посадки А-321 Технические характеристики аппаратуры А-321..........
Общие сведения о системах координат, применяемых в А-321
Принцип работы А-321.............................................
Полет по заданному маршруту..................................
Возврат и посадка на один из четырех запрограммированных аэродромов...........................................................
Взаимодействие А-321в пилотажно-навигационном комплексе
Взаимодействие А-321 с антенно-фидерной системой (АФС)
Взаимодействие А-321 с системой воздушных сигналов СВС
Взаимодействие А-321 с инерциальной курсовой системой ИКВ и доплеровским измерителем скорости и угла сноса ДИСС
ВзаимодействиеА-321 с системой автоматического управления самолетом САУ.......................................................
Взаимодействие А-321 с цифровой вычислительной машиной ЦВМ
ВВЕДЕНИЕ
На современных самолетах установлено очень большое количество разнообразного оборудования, приборов и автоматических устройств, без которых работа самолета была бы невозможной. Масса таких устройств составляет около 40 % от общей массы незаправленного самолета, а стоимость их доходит до 80% его стоимости.
Оборудование самолета представляет собой сложный технический комплекс, позволяющий выполнять поставленные задачи в любых условиях.
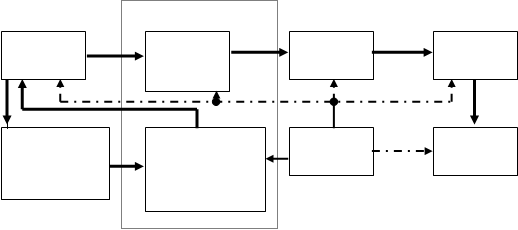
Несмотря на тенденцию к интеграции самолетного оборудования, можно выделить основные группы оборудования, каждая из которых характеризуется присущим только ей функциональным назначением. Эти группы принято считать комплексами оборудования.
Под этим термином понимается объединение блоков и приборов во взаимосвязанные группы (комплексы), предназначенные для решения определенных полетных задач. Цель комплексирования – обеспечение экипажа самолета максимумом информации при минимуме аппаратуры. Эта информация должна обеспечить экипажу всю полноту информации, необходимой для принятия решения навигационной задачи в кратчайшее время.
По признакам взаимодействия комплексы условно подразделяются на три группы: замкнутые, полуразветвленные и разветвленные.
Замкнутые комплексы имеют односторонние связи, состав их самодостаточен, а решаемые задачи элементарны. Примеры таких комплексов:
– электрическое оборудование - обеспечивает генерирование электроэнергии и ее распределение между потребителями. В его состав входят источники и преобразователи электроэнергии, светотехническое оборудование и электропривод;
– высотное оборудование - обеспечивает защиту экипажа и пассажиров от воздействия атмосферы больших высот. К этому классу оборудования относятся кислородная система и система автоматического регулирования давления, влажности, температуры и химического состава атмосферы внутри герметичной кабины;
– защитное оборудование - позволяет повысить регулярность полетов самолетов в любых метеорологических условиях и их безопасность. В состав этого оборудования входят противопожарная и противообледенительная системы;
– аварийно–спасательное оборудование, защитное снаряжение и морские спасательные средства- обеспечивают аварийное покидание экипажем борта самолета на всех режимах и высотах полета, включая разбег, взлет и посадку самолета, защиту экипажа от скоростного напора, воздействия атмосферы больших высот и перегрузок при покидании самолета. Морское спасательное снаряжение предназначено для спасения людей при аварийном покидании самолета над водой или при вынужденной посадке на воду.
Полуразветвленные комплексы имеют более развитые связи. Пример такого комплекса – система управления двигателями самолета, которая обеспечивает управление двигателями в полуавтоматическом режиме, но при необходимости бортинженер в состоянии управлять двигателями и воздухозаборниками вручную. Однако в автоматическом режиме, без получения информации о высоте и скорости полета, угле атаки и температуре наружного воздуха, система не работоспособна.
К этой же группе можно отнести и комплексную систему автоматического управления, назначение которой – автоматическая стабилизация заранее заданных параметров полета самолета и автоматическое управление самолетом по сигналам управляющих комплексов.
Разветвленные комплекесы - самая сложная группа, имеет наиболее разветвленные внешние связи и не способна работать без них ни в автоматическом, ни в полуавтоматическом режимах. Типичные разветвленные комплексы:
Комплекс приборного оборудования, который обеспечивает постоянное измерение основных параметров движения самолета: скорости, высоты, направления полета (курса), крена, тангажа, температуры за бортом, в салоне и в агрегатах самолета, давления за бортом и в герметичном салоне. В комплекс приборного оборудования входят в качестве составной части системы автоматического управления самолетом – «автопилоты» и САУ, позволяющие выполнять самолетовождение на стандартных участках полета в автоматическом режиме под контролем членов экипажа;
Комплекс радиотехнического оборудования, который обеспечивает постоянное решение навигационных задач, связь экипажа с аэродромами взлета и посадки, диспетчерами службы управления воздушным движением и другими самолетами, позволяет решать поставленные задачи – от перевозки пассажиров до боевого применения на военных самолетах.
Пример основных связей между комплексами самолета приведен на рис.1.

Рис.1. Связи между самолетными комплексами
При эксплуатации летательных аппаратов военного назначения принята следующая классификация радиотехнических систем летательных аппаратов:
‾ система перехвата летательных аппаратов.
‾ прицельно – навигационная система.
‾ система посадки летательных аппаратов.
‾ система защиты летательных аппаратов.
‾ система разведки.
‾ система связи.
Система перехвата летательных аппаратов служит для обнаружения летательных аппаратов, приближающихся к государственной границе или находящихся над территорией страны, опознавания обнаруженных объектов, их перехвата и уничтожения, если такая необходимость возникнет. В соответствии с решаемыми задачами в состав системы входят средства обнаружения различных видов (оптические, акустические, радиотехнические и пр.), радиоаппаратура опознавания государственной принадлежности и средства перехвата и уничтожения. Решение о необходимости перехвата и управление средствами перехвата осуществляется на основе предварительной информации и информации, полученной в процессе перехвата по радиоканалам связи и наведения.
Прицельно-навигационная система обеспечивает решение навигационных задач, наведение летательных аппаратов на наземные, надводные и воздушные цели, выработку прицельных данных, необходимых для применения средств поражения. Основным оборудованием системы является радиооборудование, которое работает в сочетании с магнитными, инерциальными и астронавигационными приборами.
Система посадки летательных аппаратов служит для соблюдения необходимого порядка движения летательных аппаратов в районе аэродрома и на самом аэродроме, для выполнения нормального приземления летательных аппаратов в различных метеоусловиях и в любое время суток. Основным оборудованием системы является радиооборудование в сочетании с пилотажно-навигационным и световым оборудованием.
Система защиты летательных аппаратов создана для защиты их от средств поражения противника. Система включает в себя средства обнаружения и опознавания противника и средства противодействия как тактического, так и технического характера. Основным оборудованием системы является радиооборудование, используемое как для организации огневой защиты, так и для создания помех противнику в применении средств поражения.
Система разведки дает возможность получать информацию о противнике. Радиооборудование в системе разведки занимает одно из основных мест, обеспечивая ведение радиоперехвата, радиолокационной разведки, телевизионной разведки и передачу по специально защищенным радиоканалам полученной разведывательной информации.
Система связи летательных аппаратов обеспечивает обмен информацией между различными системами, со службой управления воздушным движением и обслуживания пассажиров.
В настоящее время все радиооборудование, установленное на борту летательных аппаратов, условно делится на следующие основные группы:
– радиолокационное,
– радиосвязное,
– радионавигационное,
– радиотелеметрическое,
– телевизионное,
– аппаратура радиопротиводействия.
Установленное на самолетах оборудование работает в условиях, значительно отличающихся от наземных. Температура окружающей среды изменяется от –60 до +600С. Вблизи источников тепла (двигатели, обшивка самолета при сверхзвуковых полетах) она может достигать + 2500С. В значительных пределах изменяется влажность и плотность окружающей среды. Изменение физических свойств окружающей среды вызывает изменение величины сопротивления проводов, емкости аккумуляторов, вязкости смазочных материалов. Меняются условия охлаждения и коммуникации в электрических машинах. Особое влияние на работу оборудования оказывают вибрации, перегрузки и удары, которые могут привести к обрывам проводов, механическим разрушениям корпусов блоков, ложным срабатываниям исполнительных механизмов.
В связи с этим при проектировании и эксплуатации бортового оборудования необходимо обеспечивать выполнение всех необходимых требований для поддержания работоспособности в условиях комплексного воздействия всех дестабилизирующих факторов. Удовлетворение всем поставленным условий позволит обеспечить необходимые летно-технические характеристики и безопасность находящихся на борту людей.
Глава 1. РАДИОТЕХНИЧЕСКИЙ КАНАЛ ПЕРЕДАЧИ
ИНФОРМАЦИИ
Источником излучения электромагнитной энергии является передатчик. Если канал используется для передачи информации, то радиопередатчик вырабатывает радиосигнал, содержащий сообщение отправителя.
Электромагнитная энергия к источнику сообщения и к приемному устройству поступают по линиям передачи электромагнитной энергии, представляющим собой среду распространения радиоволн (атмосфера, вода) или специальные устройства для передачи радиоволн (волноводы, коаксиальные и аксиальные кабели и т.п.).
Прием радиосигналов, их обработка и выделение содержащейся в них полезной информации осуществляется с помощью приемного устройства, с выхода которого информация поступает в выходное устройство, где преобразуется в форму, удобную для получателя.
Все элементы канала в общем случае работают в условиях действия помех (рис.2).
 среда
среда
Источник Линия Приемное Выходное
сообщения передачи устройство устройство
сигнала
Источник Линия Источники Получатель
эл - магнитной передачи помех сообщения
энергии эл - магнитной
энергии
Рис.2 Канал передачи в условиях воздействия помех
Передающие устройства
Источники излучения электромагнитной энергии могут работать в непрерывном или импульсном режиме. Они характеризуются средней частотой излучаемых колебаний f0 и средней мощностью излучения Рср.
Основным элементом радиопередатчика является генератор колебаний высокой частоты (ГВЧ), преобразующий постоянный ток источника питания в переменный ток высокой частоты для питания антенны. ГВЧ могут быть однокаскадные и многокаскадные, состоящие из возбудителя и каскадов усиления, а иногда и из каскадов умножения частоты.
Спектр полезных сигналов, которые должны быть переданы по каналу, находится в области относительно низких частот (0 – 5 МГц). Поскольку радиосвязь возможна только на высоких частотах, необходимо «сигнал» передвинуть в область высоких частот.
Такое преобразование называется модуляцией, и осуществляется оно с помощью модуляторов.
В процессе модуляции изменяется амплитуда, частота, фаза или форма высокочастотного сигнала по законам изменения передаваемого полезного сигнала. В зависимости от изменяемого при модуляции параметра модуляция может быть амплитудной, частотной или фазовой. Если изменяется форма полезного сигнала при импульсной передаче сообщений – модуляция может быть амплитудно-импульсной, частотно-импульсной, широтно-импульсной и фазово-импульсной. Если параметры модулирующих видеоимпульсов остаются постоянными, а меняется частота или фаза ВЧ колебаний внутри импульса, то имеем внутриимпульсную частотную или фазовую модуляцию. Виды модуляции представлены на рис. 3.
Примем для простейшего случая: s(t)=UmcosWt. 
Имеется высокочастотное синусоидальное колебание  где U0, w0 и f0 – соответственно амплитуда, частота и начальная фаза. Для передачи низкочастотного колебания s(t) c помощью амплитудной модуляции амплитуда высокочастотного сигнала получает приращения, пропорциональные s(t).
где U0, w0 и f0 – соответственно амплитуда, частота и начальная фаза. Для передачи низкочастотного колебания s(t) c помощью амплитудной модуляции амплитуда высокочастотного сигнала получает приращения, пропорциональные s(t).
Выражение для амплитудно-модулированного высокочастот-ного колебания записывается в виде:  .
.
Преобразовывая, получим
 ,
,
где km – величина, определяющая глубину модуляции;
m =  коэффициент модуляции.
коэффициент модуляции.
Для исключения искажений полезного сигнала (пере-модуляции) коэффициент модуляции не должен превышать 1. На практике выбирают m = 0,4 – 0,6.
Как видим, низкочастотный сигнал входит сомножителем, а не слагаемым, что исключает его выделение с помощью фильтра. Для извлечения полезного сигнала в приемном устройстве необходима обратная операция, называемая детектированием.
s(t) 


 t
t







 Амплитудная модуляция
Амплитудная модуляция
 | |||
 | |||



 t t
t t
 | |||||
 | |||||
 | |||||

 Частотная модуляция
Частотная модуляция
 |


 t
t
 |
 Фазовая модуляция
Фазовая модуляция


t
 | |||||
 | |||||
 |
 АИМ
АИМ
U0 t
tи
Ти
ШИМ
t
КИМ
t
Рис.3 Виды модуляции
Для исключения искажений полезного сигнала (перемодуляции) коэффициент модуляции не должен превышать 1. На практике выбирают m = 0,4 – 0,6.
Как видим, низкочастотный сигнал входит сомножителем, а не слагаемым, что исключает его выделение с помощью фильтра. Для извлечения полезного сигнала в приемном устройстве необходима обратная операция, называемая детектированием.
При фазовой модуляции приращение, пропорциональное s(t), получает фаза

где kф – постоянная величина. Высокочастотный фазово-модулированный сигнал для принятого ранее значения s(t) имеет вид:

Максимальное изменение фазы  называется индексом фазовой модуляции. Величина
называется индексом фазовой модуляции. Величина  обычно значительно больше 1.
обычно значительно больше 1.
Фазовая модуляция сопровождается изменением частоты.
Известно, что частота  . Для нашего случая
. Для нашего случая

где  - максимальное отклонение мгновенного значения частоты от несущей.
- максимальное отклонение мгновенного значения частоты от несущей.
При частотной модуляции изменяется несущая частота  где
где  - постоянная величина.
- постоянная величина.

 , где
, где  - девиация частоты (максимальное частотное отклонение).
- девиация частоты (максимальное частотное отклонение).
Мгновенное значение фазы

Таким образом, частотно-модулированный сигнал может быть представлен в виде:

где  - индекс модуляции (максимальное дополнительное изменение фазы).
- индекс модуляции (максимальное дополнительное изменение фазы).
Как видим, выражения совпадают с точностью до начальной фазы.
При синусоидальном сигнале частотно- и фазово-модулированные сигналы одинаковы. При других законах изменения s(t) будут определенные различия. При фазовой модуляции индекс модуляции  , т.е.
, т.е.  и не зависит от частоты сигнала, а
и не зависит от частоты сигнала, а  пропорциональна амплитуде и частоте модулирующего сигнала.
пропорциональна амплитуде и частоте модулирующего сигнала.
При частотной модуляции величина  обратно пропорциональна W, а
обратно пропорциональна W, а  от частоты не зависит.
от частоты не зависит.
Графики соотношений частоты, амплитуды, девиации частоты и индекса модуляции представлены на рис. 4.





ФМ
ФМ, ЧМ ЧМ ФМ
ЧМ
Um W W
Рис. 4. Фазовая и частотная модуляция
Рассмотрим АМ колебания. С помощью тригонометрических преобразований видно, что уравнение АМ колебаний представляет три слагаемых, каждое из которых является вполне самостоятельным колебанием, не зависящим от других:

Эти колебания называются нижней боковой, несущей и верхней боковой составляющими.
Векторная диаграмма несущей и боковых частот при АМ представляет сумму трех векторов: вектора несущей составляющей c амплитудой U0, вращающегося с частотой  , и двух векторов, выходящих из вершины этого вектора, с амплитудой
, и двух векторов, выходящих из вершины этого вектора, с амплитудой  каждый, вращающихся с частотой W. Как видно из векторной диаграммы (рис.5), при амплитудной модуляции изменений частоты и фазы сигнала не происходит.
каждый, вращающихся с частотой W. Как видно из векторной диаграммы (рис.5), при амплитудной модуляции изменений частоты и фазы сигнала не происходит.





Рис.5 Векторная диаграмма при амплитудной модуляции
Рассмотрим максимальную, минимальную и среднюю мощность АМ колебаний.
где Рнес=  - мощность несущего колебания, выделяющаяся на некотором сопротивлении R.
- мощность несущего колебания, выделяющаяся на некотором сопротивлении R.
Максимальная мощность при m=1 Pmax= 4 Pнес
Минимальная мощность при m=1 Pmin= 0
Средняя мощность равна сумме мощностей всех составляющих спектра.
При модуляции гармоническим колебанием
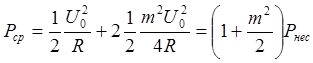
При m=1 средняя мощность равна 1,5 мощности несущего колебания.
Заметим, что информативная часть передаваемой мощности составляет всего 33% от всей средней передаваемой мощности.
С целью экономии веса и мощности источников питания в авиационных средствах связи применяются методы балансной модуляции и выделения одной боковой составляющей.
При модуляции гармоническим колебанием балансно-модулированное колебание определяется уравнением:
 ,
,
т.е. в нем отсутствует колебание несущей частоты.
Если перед балансным модулятором установить устройство, изменяющее фазу на 90˚, мы получим балансно-модулированное колебание, определяемое уравнением:

Складывая эти два колебания, получаем результирующее напряжение для однополосной модуляции (ОМ):
 .
.
Рассмотрим связь между исходным сигналом источника S(t) и однополосным сигналом.
Сигнал S(t) представим в виде S(t) = U(t)cosj(t), где U(t) – амплитуда, а j(t)- фаза сигнала.
Тогда 
Из этого выражения следует:
– колебание, содержащее одну боковую полосу, есть колебание с амплитудной и фазовой (частотной) модуляцией;
– мгновенная амплитуда однополосного сигнала с точностью до постоянного множителя воспроизводит мгновенную амплитуду модулирующего колебания;
– изменение частоты однополосного сигнала относительно несущей частоты  равно мгновенной частоте
равно мгновенной частоте  модулирующего процесса, так как
модулирующего процесса, так как  .
.
К достоинствам каналов связи с ОМ относятся: значительное снижение мощности (h=100%) и сужение полосы пропускания в два раза по сравнению с АМ. Это в два раза повышает чувствительность приемника. Вследствие эффективного использования мощности передатчика и повышения чувствительности приемника общий энергетический выигрыш канала с ОМ по сравнению с каналом АМ повышается в 8 раз. Следовательно, при одинаковой средней мощности передатчика дальность уверенной связи в системах с ОМ может быть в  (2, 83) раз большей, чем в системах с АМ.
(2, 83) раз большей, чем в системах с АМ.
Глава 2. РЕАЛЬНЫЕ СИСТЕМЫ СВЯЗИ
История развития радиотехнических средств на самолетах начинается с 1899 года. Изобретатель радио Попов, Рыбкин и Троицкий передали телеграфное сообщение с воздушного шара на поле воздухоплавательного парка в Санкт – Петербурге. В 1911 году подполковник Сокольцев передал телеграфные сигналы с самолета на дальность 20 км. В 1923 году в СССР был разработан первый радиотелефонный СВ передатчик для самолетов АК-3, в 1931 году – первый КВ телефонный и телеграфный передатчик 13-СК, в 1936 году создана командная УКВ радиостанция РСВС-1, в 1940 г. начала эксплуатироваться первая радиостанция с фиксированными частотами РСИ-3. Это был первый этап развития самолетных радиостанций для связи на близкие расстояния (УКВ радиостанции) и для связи на дальние расстояния (КВ радиостанции), положивший начало построения беспоисковой и бесподстроечной радиосвязи на УКВ радиостанциях.
Второй этап развития самолетных радиостанций закончился созданием УКВ радиостанции «Ландыш» и КВ радиостанций «Карат» и «Микрон». Характерными признаками второго этапа являются: появление в радиостанциях элементов электронной коммутации, термостатирования кварцевых генераторов опорных частот, использование одного кварцевого генератора для получения всей дискретной сетки частот, применение встроенного автоконтроля работоспособности радиостанции, применение однополосной модуляции сигналов.
В этих радиостанциях используются наряду с радиолампами транзисторы и микросхемы, модули и блочные конструкции.
Второе поколение радиостанций началось с внедрения УКВ радиостанции «Баклан» и КВ радиостанции «Ядро», которые заменили радиостанции «Ландыш», «Карат» и «Микрон».
Характерными признаками радиостанций второго поколения является применение элементов цифровых синтезаторов частот при построении дискретной сетки частот, широкое применение модульных элементов, интегральных и гибридно-пленочных схем, повышение надежности, улучшение эксплуатационных характеристик радиостанций.
Однако во втором поколении радиостанций не решены некоторые принципиальные вопросы, решенные в третьем поколении радиостанций. Это применение бортовой вычислительной техники для управления работой связного самолетного комплекса (интегральной системы связи) и применение импульсно-кодовой модуляции сигналов радиостанций (цифровая связь).
Системы связи современных самолетов представляют собой комплекс устройств, предназначенных для связи экипажей самолетов между собой и с наземными диспетчерскими пунктами управления воздушным движением, внутренней связи между членами экипажа, документирования служебных перего-воров, информации пассажиров о полете и передачи в салон самолета музыкально-развлекательных программ в радио - и видеоформатах.
По способам перехода станций с передачи на прием различают:
‾ симплексную связь;
‾ полудуплексную связь;
‾ дуплексную связь.
При симплексной связи два корреспондента ведут поочередную передачу. Когда первый работает на передачу, второй – на прием.
При полудуплексной связи передатчик включается только во время нажатия на ключ (в телеграфном режиме) или во время нагрузки модулятора (в телефонном режиме). Иногда под полудуплексной передачей понимают такую передачу, когда передатчик включается при нажатии на специальную кнопку – тангенту. Во время пауз антенная система таких радиостанций подключается автоматически к приемнику, что позволяет прослушивать встречную передачу и прекратить собственную.
Дуплексная работа позволяет одновременно вести передачу и прием в обоих направлениях. Такая работа обеспечивается определенным видом разделения приемных и передающих каналов. Обеспечение дуплексной работы возможно при применении цифровых видов передачи с использованием вычислительной техники.
УКВ РАДИОСТАНЦИИ САМОЛЕТОВ
По целевому назначению УКВ радиостанции самолетов используются в качестве командных и аварийно-спасательных. Диапазон командных радиостанций простирается от 118 до 136 МГц (в старых станциях – от 100 до 150 МГц). Основные параметры бортовых УКВ радиостанций приведены в таблице 1.
Аварийная радиостанция Р-855УМ
Технические данные: Радиостанция является ультракоротко-волновой, симплексной, переносной, малогабаритной, индиви-дуального пользования.
Виды работ – радиотелефон, радиомаяк с прерывистой тональной модуляцией.
Рабочая частота – одна их фиксированных: 121,5 МГц; 118,8 МГц; 114,583 МГц.
Стабилизация частоты – кварцевая.
Мощность передатчика в режиме несущей – не менее 150 мВт.
Вид модуляции – амплитудная.
Глубина модуляции голосом – не менее 85 %.
Питание осуществляется ртутно-цинковой батареей ПРИБОЙ-2С напряжением 10 В.
Свежеизготовленная батарея обеспечивает непрерывную работу радиостанции в режиме: 1 минута Передача, 3 минуты Прием - в течение 60 часов. В режиме Тон продолжительность непрерывной работы не менее 24 часов.
Срок службы батареи 2,5 года.
Дальность связи между двумя наземными станциями не менее 800 м.
Дальность связи с поисковым самолетом (вертолетом) на высоте 1000 м – 35  50 км, на высоте 3000 м – 50 70 км.
50 км, на высоте 3000 м – 50 70 км.
Радиостанция влагонепроницаема и сохраняет параметры после пребывания в морской воде на глубине 1 метра в течение 1 часа.
Коротковолновые радиостанции
Во время полета самолетов расстояние между ними и наземными диспетчерскими пунктами управления воздушным движением все время изменяется. На расстоянии прямой видимости (120 км на высоте 1000 м, 240 км на высоте 5000 м, 350км на высоте 10000 м) применяются УКВ радиостанции. КВ радиостанции применяются как на малых, так и на больших расстояниях (до нескольких тысяч км), поэтому они являются резервными для УКВ радиостанций.
КВ радиостанции обеспечивают симплексную телефонную и телеграфную радиосвязь.
В телефонной связи применяются амплитудная АМ и однополосная ОМ модуляция сигналов. В телеграфной связи применяются амплитудная АТ и частотная ЧТ модуляции. Основные параметры бортовых КВ радиостанций приведены в таблице 2.
Магнитофоны МС-61 и МН-61.
Магнитофоны МС-61 и МН-61 образуют сквозной тракт записи – воспроизведения сигналов с выходов радиоприемников, СПУ, с ларингофонов ЛА-5 или с абонентской гарнитуры.
Магнитофон МС-61 предназначен для записи сигналов с выходов радиоприемников, СПУ, с ларингофонов ЛА-5 или с абонентской гарнитуры на проволочный звуконоситель на борту самолета.
Магнитофон МН-61 служит для воспроизведения сигналов, записанных на магнитофоне МС-61. Кроме того, МН-61 является индивидуальным устройством для записи и воспроизведения речи с выходов радиоприемников, линий и микрофонов в наземных условиях.
Магнитофоны МС-61 и МН-61 предназначены для работы в узком частотном диапазоне 300  3000 Гц. При таком диапазоне можно обойтись небольшими скоростями записи и воспроиз-ведения сигналов. Это дает возможность осуществить долговре-менную запись, крайне необходимую при больших длительностях полетов самолетов.
3000 Гц. При таком диапазоне можно обойтись небольшими скоростями записи и воспроиз-ведения сигналов. Это дает возможность осуществить долговре-менную запись, крайне необходимую при больших длительностях полетов самолетов.
Общие требования к бортовым с
Последнее изменение этой страницы: 2017-09-22
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...