Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Методы измерения угловых координат
Угловые координаты цели измеряются с помощью анализа амплитудных или фазовых соотношений в приходящих сигналах.
Амплитудные методы измерения угловых координат
Амплитудные методы используют зависимость амплитуды приходящего (отраженного) сигнала от направления его прихода.
Различают методы:
– выделение максимума сигнала;
– выделение минимума сигнала;
– сравнение амплитуд сигналов (равносигнальный метод).
Метод максимума заключается в перемещении антенной системы с узкой диаграммой направленности в определенных секторах ожидания цели или же по кругу. В момент, когда амплитуда принимаемого сигнала достигнет максимального значения, по положению оси антенны производят отсчет угловой координаты. Зависимость амплитуды принимаемого сигнала от угла поворота антенны, а следовательно, от углового положения цели, называется пеленгационной характеристикой.
Uвых
 DUмин Uмакс
DUмин Uмакс
j
Djмин
jц
Рис.7. Пеленгационная характеристика (метод максимума)
Крутизна пеленгационной характеристики в точке отсчета пеленга определяет пеленгационную чувствительность и, следова-тельно, точность измерения.
Численно пеленгационную чувствительность можно представить в виде минимального угла различимости Djмин (ошибка пеленгования), при которой изменение амплитуды полученного сигнала DUмин может быть однозначно выделено (рис.7).
Достоинства метода – простота пеленгатора, связанная с наилучшим соотношением сигнал / шум при отсчете пеленга в момент приема максимальной амплитуды сигнала.
Недостаток – весьма низкая точность, связанная с «размыто-стью» максимума, равной примерно ¼ ширины луча. В связи с этим метод применяется обычно в дециметровом и сантиметровом диапазонах волн (10 см и короче), где применяются антенны с весьма узким лучом.
При применении метода минимума используется вращающая-ся антенна с двухлепестковой или многолепестковой диаграммой направленности, например, рамка. Антенна вращается с опреде-ленной, достаточно стабильной скоростью. Время от начальной точки отсчета до полного пропадания ответного сигнала (антенна направлена минимумом на цель) пропорционально угловой координате цели.
Достоинства метода состоят в относительной простоте пеленгации и достаточно высокой точности отсчета по сравнению с методом максимума, так как крутизна сигнала в области нуля значительно выше, чем в максимуме.
К недостаткам метода относятся:
– невозможность наблюдения сигнала и оценки его характеристик в момент пеленгации;
– сильное влияние шумов на точность определения пеленга.
Наличие шумов при отсчете пеленга приводит к появлению зоны неопределенности из-за того, что сигнал пропадает в шумах раньше, чем его амплитуда становится равной нулю (рис.8).
Точность метода можно повысить, применяя попеременное вращение антенны в разные стороны и усредняя полученное значение пеленга: 
 Uсигн Направление минимума
Uсигн Направление минимума
Уровень помех (шума)
j
j1 jц j2
Рис.8 Пеленгационная характеристика (метод минимума)
Метод минимума нашел широкое применение в радионави-гации, где полезный сигнал обычно достаточно мощный и во много раз превышает шумы.
При определении угловых координат методом сравнения используются две одинаковые, раздвинутые между собой диаграммы направленности, реализованные одной неподвижной антенной системой. Сигналы, полученные каждой из диаграмм направленности, сравниваются между собой в схеме вычитания.
В случае, когда направление на цель совпадает с осью симметрии диаграмм, принятые сигналы оказываются равными по величине. Направление, вдоль которого наблюдается нулевая разность сигналов, называется равносигнальной зоной.
Частным случаем метода сравнения является равносигнальный метод, который отличается от вышеописанного тем, что вместо неподвижной антенной системы применяется сканирующая антенна. Сигнал рассогласования входных сигналов управляет антенной системой, подстраивающейся в направлении цели таким образом, что на выходе приемного устройства получаются равные по величине сигналы.
Метод сравнения примерно в 10 раз точнее метода максимума в связи с использованием пеленгационной характеристики с большой крутизной и отличается от метода минимума значительно лучшим соотношением сигнал / шум.
Недостатком метода является бóльшая сложность аппаратуры и меньшая, чем у метода максимума, дальность действия, так как пеленг отсчитывается не при максимальных значениях амплитуд приходящих сигналов.
Фазовые методы измерения угловых координат
При фазовом методе пеленгации аппаратурой анализируются фазовые соотношения сигналов, поступающих одновременно на разнесенные в пространстве антенные системы.
 J = 0
J = 0
J
Dd
J
A2 d A1
Рис.9 Фазовый метод пеленгации
Разность фаз сигналов Dj, принимаемых антеннами А1 и А2, пропорциональна разности расстояний до объекта от антенн А1 и А2, т.е. величине  ,
,
где d – разнос антенн в пространстве (база антенн) (рис.9).
Для малых углов j  и
и 
Измерив разность фаз  , можно определить направление прихода сигнала от объекта относительно перпендикуляра к середине базы. Измеряется обычно с помощью фазового детектора. Для обеспечения постоянного фазового соотношения между сигналами антенн используется один гетеродин для обоих приемных каналов. Для исключения влияния амплитуды сигнала на точность измерения применяется усиление сигналов с глубоким ограничением их по амплитуде.
, можно определить направление прихода сигнала от объекта относительно перпендикуляра к середине базы. Измеряется обычно с помощью фазового детектора. Для обеспечения постоянного фазового соотношения между сигналами антенн используется один гетеродин для обоих приемных каналов. Для исключения влияния амплитуды сигнала на точность измерения применяется усиление сигналов с глубоким ограничением их по амплитуде.
Фазовый детектор производит перемножение сигналов, поступающих с усилителей промежуточной частоты каждого из приемников, и выделяет постоянную составляющую.
Знак выходного напряжения будет определять сторону отклонения объекта от перпендикуляра к базе, а его амплитуда – величину этого отклонения.
Крутизна пеленгационной характеристики на равносигналь-ном направлении  .
.
Для повышения пеленгационной чувствительности (точности измерения направления), необходимо увеличение относительного размера базы  , которое возможно либо за счет увеличения расстояния между приемными антеннами, либо за счет укорочения длины волны (увеличения частоты работы системы).
, которое возможно либо за счет увеличения расстояния между приемными антеннами, либо за счет укорочения длины волны (увеличения частоты работы системы).
Достоинства фазового метода – принципиальная возможность более точного измерения координат.
Недостатки – ошибки пеленгации при нарушении фазовых сдвигов в приемных каналах, большая сложность антенных систем, неоднозначность измерений.
Методы измерения скорости
В основе измерения скорости цели лежит эффект Доплера.
Доплеровское смещение частоты определяется выражением
 .
.
На вход приемника поступают с передатчика через аттенюатор непрерывные колебания  и колебания отражен-ного сигнала
и колебания отражен-ного сигнала  ,
,
где Uпрд – амплитуда напряжения передатчика;
Uc – амплитуда напряжения отраженного
сигнала;
 – сдвиг фаз между излучаемым и прини-
– сдвиг фаз между излучаемым и прини-
маемым сигналами.
Амплитуда результирующего напряжения на входе приемника
 .
.
В связи с тем, что  >> Uc, обычно считают
>> Uc, обычно считают
 , где m =
, где m =  .
.
При неподвижной цели дальность до нее остается постоянной, сдвиг фаз не меняется и значение результирующего напряжения на входе приемника будет оставаться постоянным.
При движении объекта величина сдвига фаз будет меняться, что вызовет изменение амплитуды результирующего напряжения на входе приемника с круговой частотой Доплера:

В выходном устройстве по значению доплеровской частоты определяется радиальная скорость объекта  .
.
Работа измерителя скорости может обеспечиваться как непрерывным излучением, так и импульсной работой. В этом случае на выходе приемника получим видеоимпульсы, амплитуда которых будет также изменяться по гармоническому закону. Может оказаться, что при определенных значениях скорости объекта  ее дальность за период посылки импульсов будет изменяться на такую величину DD, которая вызовет изменение фазы отраженного сигнала на величину 2pn. При этом амплитуда результирующего напряжения на входе приемника не изменяется, следовательно, выделить частоту Доплера, т.е. измерить скорость объекта, невозможно.
ее дальность за период посылки импульсов будет изменяться на такую величину DD, которая вызовет изменение фазы отраженного сигнала на величину 2pn. При этом амплитуда результирующего напряжения на входе приемника не изменяется, следовательно, выделить частоту Доплера, т.е. измерить скорость объекта, невозможно.
Скорость, при которой появляется подобный эффект, называется «слепой» скоростью  сл.
сл.
Радиоустройства, использующие эффект Доплера, применяют-ся для построения систем селекции движущихся целей, т.е. выделения движущихся с переменной относительно наблюдателя скоростью целей, не выводя на индикацию как неподвижные цели, так и те, скорость которых относительно объекта не изменяется.
Доплеровский метод очень широко применяется также при построении измерителей скорости и угла сноса самолета (ДИСС).
Методы определения местоположения объектов
Местоположение объектов в пространстве определяется обычно в прямоугольной, полярной или цилиндрической системах координат. Для определения местоположения объекта на плоскости достаточно иметь две координаты, а для определения его местоположения в пространстве – три координаты.
Геометрическое место точек, для которых геометрическая величина, характеризующая положение цели, постоянна, называется линией положения
Радиотехнические средства позволяют определять следующие геометрические величины, характеризующие местоположение объекта:
1) пеленг  искомой точки М из фиксированной точки А или же обратный пеленг
искомой точки М из фиксированной точки А или же обратный пеленг  ; при этом пеленг, отсчитываемый относительно северного направления географического мери-диана называется истинным, а отсчитываемый относительно продольной оси самолета или корабля – бортовым, линия положения – прямая, проходящая через точки А и М; (рис.10);
; при этом пеленг, отсчитываемый относительно северного направления географического мери-диана называется истинным, а отсчитываемый относительно продольной оси самолета или корабля – бортовым, линия положения – прямая, проходящая через точки А и М; (рис.10);
 N
N
N продольная ось
 и
и
 и M
и M
 б
б
A
Рис. 10. Пеленг и линия положения точки А относительно М
2) разность пеленгов  двух фиксированных точек А и Б из искомой точки М и линия положения - часть окружности, на которой лежат точки А, Б и М, и по которой перемещается точка М так, чтобы
двух фиксированных точек А и Б из искомой точки М и линия положения - часть окружности, на которой лежат точки А, Б и М, и по которой перемещается точка М так, чтобы  была постоянной (рис.11);
была постоянной (рис.11);

Рис. 11. Пеленг и линия положения точки М относительно А и Б
3) расстояние D между искомой и фиксированной точкой, линия положения которого - окружность с центром в точке А и радиусом D, проходящая через точку М (рис.12);
Рис. 12. Расстояние и линия положения точки М относительно А
4) разность расстояний между искомой и двумя фиксированными точками, линия положения – гипербола, в фокусах которой расположены точки А и Б (рис. 13);

Рис. 13. Разность расстояний и линии положения точки М относительно А и Б
5) сумму расстояний от искомой до двух фиксированных точек, для которой линия положения – эллипс, проходящий через точку М, с фокусами в точках А и Б (рис.14).

Рис. 14. Сумма расстояний и линия положения точки М относительно А и Б
Местоположение цели на плоскости определяется нахожде-нием пересечения каких-либо двух линий положения (рис.15). На практике используют обычно пересечение следующих линий положения:
– двух прямых (пеленгационный метод), этот метод получил широкое распространение в радионавигации;
– двух окружностей (дальномерный метод);
– двух гипербол (разностно-дальномерный, или гиперболичес-кий метод);
– прямой и окружности (угломерно-дальномерный метод).
| 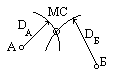
| МС Б2 А1 А2 Б1 | 
|
| Двух прямых | Двух окружностей | Двух гипербол | Прямой и окружности |
Рис. 15. Местоположение цели на плоскости
При определении пространственного местоположения линии положения необходимо заменить поверхностями положения. Например, линия постоянной дальности (окружность) заменяется сферой с тем же радиусом. Линия постоянного пеленга превратится в вертикальную плоскость, проходящую через фиксированную и искомую точку.
Для определения местоположения в этом случае необходимо найти точку пересечения поверхностей положения.
Положение цели в пространстве относительно заданной фиксированной точки О в полярной системе координат характе-ризуется дальностью D и углами j и J, отсчитываемыми в двух взаимно перпендикулярных плоскостях, проходящих через фикси-рованную точку.
При определении местоположения летательного аппарата относительно фиксированной точки на земле углы j и J соответствуют азимуту и углу места цели. Иногда угол места заменяется высотой (цилиндрическая система координат).
В большинстве случаев в радионавигации ограничиваются определением дальности и азимута, т.е. двух координат.
Итак, первая задача настоящего курса – ознакомиться с радиотехническими методами измерения координат и параметров движения – решена.
Следующая задача – ознакомиться с основными способами технической реализации радиотехнических методов, с основными принципами работы, тактико-техническим данными и составом аппаратуры некоторых конкретных систем и устройств навигационно-пилотажного комплекса.
Глава 4. УГЛОМЕРНЫЕ РАДИОНАВИГАЦИОННЫЕ
УСТРОЙСТВА
Угломерные радионавигационные устройства предназначены для измерения угловых координат самолета и подразделяются на бортовые и наземные, передающие (радиомаяки) и приемные (пеленгаторы).
Для определения угловых координат самолета используются следующие аппаратурные решения:
– применение бортовых автоматических радиокомпасов совместно с приводными радиостанциями (ПРС) и широковещательными радиостанциями (ШВРС);
– применение наземных радиопеленгаторов совместно с бортовыми системами средств связи;
– бортовые приемные навигационные устройства и наземные радиомаяки.
Автоматические радиокомпасы
Автоматический радиокомпас (АРК) предназначен для самолетовождения по приводным и широковещательным маякам и радиостанциям, а также для выполнения предпосадочных маневров.
АРК обеспечивает непрерывный отсчет курсового угла радиостанции (КУР), т.е. угла в горизонтальной плоскости между продольной строительной осью самолета и направлением на радиостанцию.
АРК позволяет решать следующие навигационные задачи:
– совершать полет на радиостанцию и от нее с визуальной индикацией КУР (нульвождение);
– автоматически определять пеленг на радиостанцию по указателю текущего курса;
– обеспечивать непрерывный отсчет КУР;
– совершать предпосадочный маневр и посадку самолета по приборам по системе слепой посадки (ОСП);
– принимать и прослушивать сигналы от приводных радиомаяков и широковещательных радиостанций, работаю-щих в диапазонах длинных и средних волн (диапазон частот 100 – 2000 кГц).
Точность определения курсового угла радиостанции составляет ±(2 ¸ 3)0 и дальность действия 300 – 600 км.
Структурная схема автоматического радиокомпаса представлена на рис. 16.
В основу действия автоматического радиокомпаса положено использование направленного приема энергии электромагнитного поля, излучаемого приводным радиомаяком или широковеща-тельной радиостанцией. Для этого на входе приемника устанав-ливается специальная антенна, обладающая резко выраженным направлением нулевого приема.
Такой антенной является рамочная антенна. Амплитуда или мощность принимаемого такой антенной сигнала зависит от направления прихода радиоволн. Фазы сигнала для направлений приема, расположенных в левой и правой полуплоскостях, отличаются на 1800, что позволяет однозначно определять направление на пеленгуемую радиостанцию. В этой системе применяется описанный в предыдущих разделах метод пеленгования по минимуму сигнала. Этот метод, как было сказано ранее, обладает повышенной точностью благодаря максимальной крутизне диаграммы направленности антенны и, следовательно, высокой чувствительностью к отклонению оси антенны от направления на радиомаяк в области минимума сигнала. Точность в таких системах в основном зависит от уровня помех.
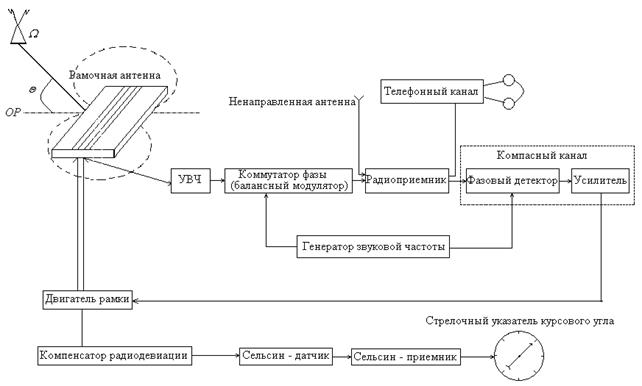 Рис. 16. Обобщенная структурная схема автоматического радиокомпаса
Рис. 16. Обобщенная структурная схема автоматического радиокомпаса
Все радиокомпасы, как отечественные, так и зарубежные, построены по классической схеме с балансной модуляцией и работают в одном из трех режимов:
– в режиме автоматического пеленгования КОМПАС (основной режим);
– в режиме приема сигналов на направленную антенну РАМКА;
– в режиме приема сигналов на ненаправленную антенну АНТЕННА.
Так как рамочная антенна обладает двумя направлениями минимума слышимости, только ее применение для автоматической пеленгации невозможно, и на самолетах устанавливаются две антенны – рамочная и ненаправленная (штыревая или шлейфовая).
Суммарная диаграмма направленности этих двух антенн представляет кардиоиду, однозначно определяющую направление на пеленгуемую радиостанцию.
Работа АРК основывается на сложении сигналов пеленгуемой радиостанции, принятых на обе антенны, и коммутации сигналов с рамки с частотой опорного генератора, в результате чего напряжение на входе приемника оказывается промодулированным по амплитуде. Путем сравнения сигналов на выходах приемника и опорного генератора вырабатывается сигнал ошибки, поступающий в следящую систему. Этот сигнал заставляет следящую систему повернуть рамочную антенну таким образом, чтобы направление приема минимума сигнала рамочной антенны совпало с направлением на пеленгуемый радиомаяк. Угол поворота рамки с помощью дистанционной электромеханической системы передачи угла поворота (сельсина) передается на индикаторное устройство, указывающее курсовой угол радиостанции.
АРК является амплитудно-фазовым пеленгатором, в котором принятый рамочной антенной сигнал несет информацию о направлении на пеленгуемую радиостанцию, так как наличие сигнала на выходе рамочной антенны несет информацию об отклонении продольной оси самолета от направления на радио-маяк, амплитуда сигнала пропорциональна углу отклонения пеленга от оси самолета, а фаза сигнала указывает сторону отклонения.
Пеленгация в реальном радиокомпасе производится по равносигнальному методу. Специальное устройство – коммутатор фазы (балансный модулятор) периодически с частотой несколько десятков герц изменяет фазу эдс, наводимой в рамочной антенне, на 1800. Это приводит к изменению с такой же частотой направления кардиоиды с правого на левое.
Компасное устройство измеряет разность амплитуд сигналов, полученных правой и левой кардиоидой, усиливает разностный сигнал и подает его на двигатель поворота рамочной антенны. При этом ее поворот будет происходить по часовой стрелке в том случае, если сигнал с правой кардиоиды будет иметь бóльшую амплитуду, чем сигнал с левой кардиоиды. При равенстве сигналов поворота рамки происходить не будет, следовательно, в этот момент минимум диаграммы направленности рамки направлен на пеленгуемую радиостанцию. Таким образом мы получаем направление устойчивого пеленга – любое отклонение от этого направления будет сводиться к нулю.
Но одинаковые амплитуды сигналов будут приходить и в том случае, если минимум направлен на радиостанцию с ошибкой в 1800. В этом случае мы имеем явление неустойчивого пеленга – любое небольшое отклонение рамки от этого положения либо вследствие влияния шумов, либо эволюции самолета отно-сительно пеленгуемой радиостанции вызовет на двигателе увеличивающееся напряжение ошибки, которое сведется к нулю в точке устойчивого пеленга.
При этом плоскость рамочной антенны всегда перпендику-лярна направлению на пеленгуемую радиостанцию. За начало отсчета принимается такое положение рамочной антенны, при котором ее плоскость перпендикулярна продольной оси самолета.
Измерив угол между началом отсчета и направлением на пеленгуемую радиостанцию, мы получим курсовой угол радиостанции (КУР).
При эксплуатации АРК на самолетах отмечено, что ошибка измерения КУР не только больше расчетной, но и различается в зависимости от направления на пеленгуемую радиостанцию. Причина такого явления – возбуждение и отражение принимае-мого сигнала элементами конструкции самолета (вторичное излучение).
В результате вторичного излучения результирующая диаграмма направленности приемных антенн искажается. Это явление называется радиодевиацией.
В этом случае рамочная антенна разворачивается не на угол пеленга, а на угол отсчета радиокомпаса (ОРК). При наличии радиодевиации КУР равен алгебраической сумме ОРК и поправки на радиодевиацию DР.
Радиодевиация может достигать значительной величины, но является практически постоянной для пары – данного самолета и радиокомпаса.
Для компенсации ошибок пеленгации, вызванных влиянием фюзеляжа, крыльев, внешних подвесок и других выступающих частей самолета на диаграмму направленности антенной системы АРК, применяют специальные компенсаторы, электрические и механические.
Компенсатор радиодевиации вносит поправку в показания стрелочного указателя на основании графика радиодевиации, снимаемого для каждого самолета индивидуально, при этом АРК обеспечивает практическую точность ±(2¸3)0. В общем случае погрешности могут быть инструментальными и методическими. К методическим погрешностям следует отнести неустойчивую работу АРК в «воронке радиостанции» и влияние отклонения плоскости поляризации радиоволн от вертикального положения, связанное с особенностями их распространения. К инструмен-тальным можно отнести креновые и динамические погрешности. Креновая ошибка возникает при отклонении плоскости вращения рамки от горизонтальной, а динамическая ошибка связана с характеристиками следящей системы и влиянием помех. Для уменьшения влияния динамических погрешностей в радиокомпа-сах применяется дополнительная рамочная антенна, диаграмма направленности которой перпендикулярна диаграмме основной рамочной антенны.
В режиме РАМКА все каскады, обеспечивающие автоматическое пеленгование, отключаются. АРК работает как приемник с направленной антенной, управление которой осуществляет член экипажа путем нажима тумблера ручного вращения влево или вправо. Пеленгование проводится по отсутствию прослушивания сигнала при определенном положении рамочной антенны. Режим РАМКА применяется в основном в условиях высокого уровня электростатических помех (грозовые явления).
В режиме АНТЕННА АРК используется как приемник с всенаправленной антенной для приема, прослушивания и опознавания позывных сигналов радиомаяков. В этом режиме рамочный вход и управляющая схема отключаются.
В настоящее время в отечественной авиации используются радиокомпасы АРК-9, АРК-10, АРК-11, АРК-15, АРК-22 и другие. Все они работают в международном диапазоне 100 – 2000 кГц.
На зарубежных самолетах наиболее распространен АРК фирмы Маркони АД-360 (Англия), который работает в диапазоне 100÷1790 кГц. Его точность определения курсового угла радиостанции составляет ±2,50.
Последнее изменение этой страницы: 2017-09-22
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...