Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Команда возврата из подпрограммы
RET; ((SP)) ® PCL.
((SP)+1) ® PCH.
SP: = (SP)+2.
Содержимое двух ячеек вершины стека заносится в РС. Таким способом реализуется возврат в “основную” программу.
Микропроцессор ВМ80 имеет восемь команд условных вызовов подпрограмм и восемь условных возвратов из подпрограмм. Проверяются единичные и нулевые значения флагов Z, CY, P, S. Если проверяемое в команде вызова или возврата условие выполняется, то осуществляется вызов или возврат. А если условие не выполняется, то выполняется следующая по порядку команда.
Команды условного вызова и условного возврата в таблице команд представлены в виде обобщенных мнемокодов команд (см. приложение 1)
C con b3b2 и R con.
В системе команд МП имеется особая 1-байтная команда вызова, предназначенная для обработки прерываний, введения контрольных точек при отладке программ. Она называется рестартом RST n. В коде команды RST n=11NNN111 три бита NNN формируются подсистемой прерываний или задаются программистом. Имеется восемь команд RST n = 0, 1, 2, 3, 4, 5, 6, 7. Выполнение команды сводится к двум действиям:
- текущее содержимое РС загружается в стек;
- в РС передается код 0000 0000 00NN N000B. Здесь NNN есть двоичный код n.
Таким образом, в зависимости от NNN микропроцессор переходит к одной из восьми ячеек памяти, которые могут быть начальными адресами подпрограмм.
Команды операций ввода-вывода
IN , port; (port) ® A, где port - восьмибитный адрес порта ввода.
OUT , port; (A) ® port, где port - восьмибитный адрес порта вывода.
Специальные команды
Инвертирование аккумулятора
 CMA; (A) ® A.
CMA; (A) ® A.
Установка и инвертирование бита CY.
STC; 1 ® CY.
 CMC; (CY) ® CY.
CMC; (CY) ® CY.
EI; Разрешение прерываний.
DI; Запрещение прерываний.
NOP; “Пустая” команда, пропуск 4 тактов.
HLT; Команда останова. МП воспринимает запросы прерывания и запросы шин.
Полный список команд приведен в приложении 1.
Вопросы и задания
2.31.Поясните выполнение команд ADD и ADC, SUB и SBB и какие признаки формируются в регистре F.
2.32.Поясните команду DAD. Обратите внимание, что при ее выполнении формируется только признак переноса CY.
2.33.Перечислите команды, позволяющие сравнивать двоичные коды.
2.34.Поясните отличие команд:
INR H; DCR D;
INX H; DCX D.
2.35.Занесите в аккумулятор десятичное число 73 в двоично-десятичном коде и определите содержимое аккумулятора и признаки результата после каждой из команд:
ORI, 0Fh;
ANI, F0h;
XRA, A.
2.36.Содержимое какого устройства изменяют команды RLC, RRC, RAL и RAR и поясните выполняемые ими операции.
2.37.Поясните, что общего и различного при выполнении команд:
JMP 0000h;
CALL 0000h;
RST 0.
2.38.Для чего служат команды EI и DI.
Управление системой
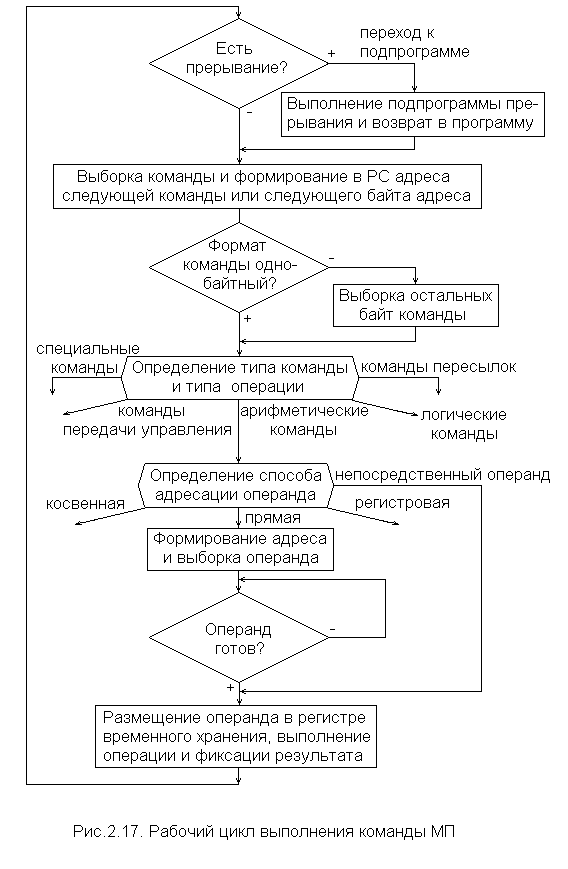
В основе устройства управления МП используется цифровой автомат. Примерная схема алгоритма функционирования управляющего автомата в течение рабочего цикла выполнения команды приведена на рис.2.17. Выполнение рабочего цикла команды начинается с опроса триггера прерывания. Если запрос прерывания поступил и прерывания разрешены (командой EI), то автомат формирует машинный цикл обработки прерывания, в котором управление передается подпрограмме обработки прерывания, и она выполняется. При отсутствии прерывания управляющий автомат формирует цикл выборки команды из памяти и формирует адрес следующей команды.
Далее управляющий автомат дешифрирует код операции в команде и генерирует соответствующую коду операции серию управляющих сигналов, обеспечивающую выполнение в МП заданной операции.
Алгоритм работы управляющего автомата содержит условный оператор ожидания готовности операнда. Наличие такого оператора в алгоритме позволяет МП приспосабливаться для работы с различными видами внешней памяти, имеющей разные времена доступа, а также с медленно действующими устройствами ввода-вывода (УВВ). Наличие в схеме алгоритма устройства управления, оператора ожидания готовности операнда, механизма анализа запросов на прерывание и запросов на захват шин позволяет МП формировать последовательность управляющих сигналов не только на основе команды, но и под воздействием внешних управляющих сигналов Ready, INT, HOLD.
Устройство управления МП в зависимости от кода текущей команды, состояния своего управляющего автомата, а также в зависимости от значений сигналов оповещения с шины управления МПС вырабатывает последовательности сигналов, реализующие процедуры системного обмена информацией.
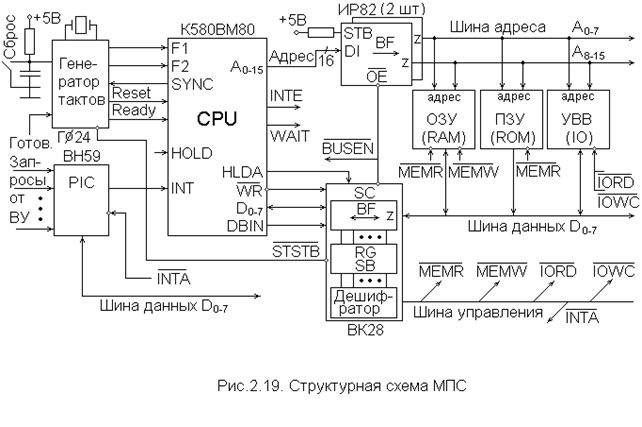
В МП управляющий автомат в зависимости от сложности команды выполняет цикл команды за несколько (1-5) внутренних машинных циклов. Один машинный цикл требуется МП для одного обращения к памяти или УВВ. Машинный цикл МП ВМ80 может состоят из 3-5 тактов. Тактирование МП осуществляется от внешнего генератора сигналами F1, F2 (рис.2.18, 2.19). В стандартном машинном цикле может быть от трех до пяти состояний автомата управления.
Микропроцессор ВМ80 приступает к анализу запросов на прерывание только после окончания выполнения текущей команды.
Из состояния останова МП может быть выведен сигналом прерывания INT или сигналом установки в исходное состояние Reset.
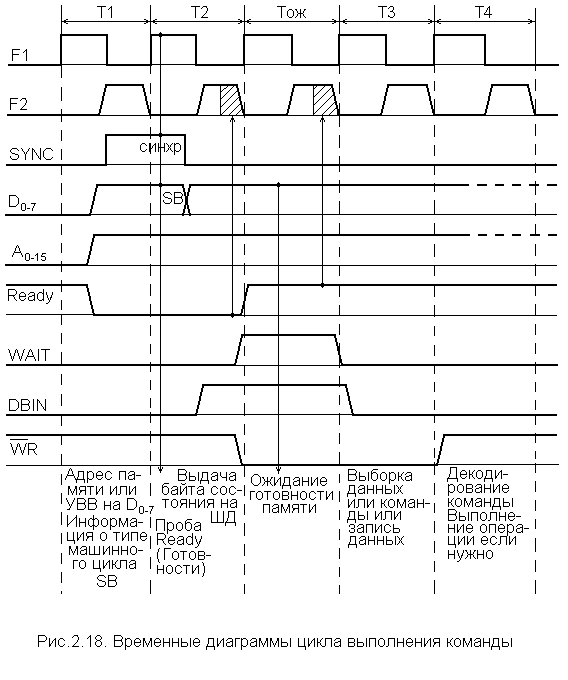
Временная диаграмма, изображенная на рис.2.18, определяет основной цикл команды МП. В первом такте синхронизации Т1 МП выставляет на шине адреса код адреса А0-15 очередной команды. Одновременно на линии синхронизации SYNCпоявляется единичный сигнал, который идентифицирует информацию на шине данных D0-7 как байт состояния SB процессора и загружает его в регистр системного контроллера К580ВК28 (рис.2.19).
Сигнал SYNC также свидетельствует о начале машинного цикла. По окончании сигнала SYNC буферная схема шины данных, расположенная в системном контроллере, переводит шину данных D0-7 в режим ввода, о чем свидетельствует единичный сигнал на линии DBIN шины управления.
В такте Т2 МП осуществляет проверку готовности внешнего устройства (или памяти). Если внешнее устройство не формирует сигнал Готов (высокий уровень), то автомат управления МП переходит в состояние ожидания. В этом состоянии МП будет находиться до тех пор, пока на линии Ready не появится единичный сигнал, который будет свидетельствовать о том, что память или ВУ готовы к обмену. На временных диаграммах (рис.2.18) приведен вариант отсутствия готовности в течение одного такта и МП сформировал один такт ожидания Тож, в котором обнаружил единичный сигнал готовности Ready и перешел к рабочему такту Т3. В такте Т3 МП производит чтение или запись слова в память. Такты Т4 и Т5 отводятся для выполнения операции, заданной кодом операции команды. Выполнение некоторых сложных команд требует неоднократного прохода по циклу состояний автомата управления от Т1 до Т5.
Для нормального функционирования МПС недостаточно управляющих сигналов, формируемых МП на собственных выводах. Например, нельзя отличить циклы обращения к памяти от циклов обращения ввода-вывода. Расширение числа управляющих сигналов достигается с помощью специального 8-разрядного кода BS (байта состояния), который МП выдает через шину данных в первом такте Т1 каждого машинного цикла. Байт состояния BS содержит информацию о текущем машинном цикле. Всего 11 типов машинных циклов:
Тип Мнемоника Функциональное назначение
Последнее изменение этой страницы: 2016-07-22
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...