Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Роль и место моделирования в исследовании систем.
Предмет теории моделирования.
Моделирование - это замещение одного объекта (оригинала) другим (моделью) и фиксация и изучение свойств модели. Замещение производится с целью упрощения, удешевления, ускорения изучения свойств оригинала.
В общем случае объектом-оригиналом может быть естественная или искусственная, реальная или воображаемая система. Она имеет множество параметров S0 и характеризуется определёнными свойствами. Количественной мерой свойств системы служит множество характеристик Y0, система проявляет свои свойства под влиянием внешних воздействий Х.
Множество параметров S и их значений отражает её внутреннее содержание - структуру и принципы функционирования. Характеристики S - это в основном её внешние признаки, которые важны при взаимодействии с другими S.
Характеристики S находятся в функциональной зависимости от её параметров. Каждая характеристика системы y0ÌY0 определяется в основном ограниченным числом параметров {S0k}ÌS0. Остальные параметры не влияют на значение данной характеристики S. Исследователя интересуют, как правило, только некоторые характеристики S: {y}ÌY0 при конкретных воздействиях на систему {xmn}ÌX.
Модель — это тоже система со своими множествами параметров Sm и характеристик Ym. Оригинал и модель сходны по одним параметрам и различны по другим. Замещение одного объекта другим правомерны если интересующие исследователя характеристики оригинала и модели определяются однотипными подмножествами параметров и связаны одинаковыми зависимостями с этими параметрами:
yok=f({Soi},{xon},T); (1.1)
ymn=f({Smi},{xmn},Tm) (1.2)
где, ymn - к-ая характеристика модели, ymnÌYm
xmn - внешнее воздействие на модель, xmnÌX
Tm - модельное время.
При этом soi=Y(Smi); xonw(xmn), T=mTm (где m - масштабный коэффициент) на всём интервале [0-Tm] или в отдельные периоды времени. Тогда с некоторым приближением можно сделать вывод о том, что характеристики Ор, связаны с характеристиками М зависимостями yok=j(ymk). Множество характеристик модели Ymk={ymk} является отображением множества интересующих характеристик оригинала yok={ yok}, т.е. j: Yok®ymk, т.е. j: Yok®Ymk.
При исследовании сложных естественных S, у которых известны Yok, но мало изучен состав элементов и принципы их взаимодействия с помощью моделирования может решаться обратная задача. Строят предположительную модель, определяющая её характеристики Ymk при эквивалентных внешних воздействиях {xmn} (w: {xon}® {xmn}) и, если оказывается, что имеет место отображение j: Yok ® Ymk с некоторой известной функцией j, то считается, что система-оригинал имеет такие же параметры.
Моделирование целесообразно, когда у модели отсутствуют те признаки оригинала, которые препятствуют его исследованию.
Теория моделирования — взаимосвязанная совокупность положений, определений, методов и средств создания моделей. Сами модели являются предметом теории моделирования.
Теория моделирования является основной составляющей общей теории систем - системологии, где в качестве главного принципа постулируются осуществимые модели: система представима конечным множеством моделей, каждая из которых отражает определённую грань её сущности.
Классификация моделей.
Физические модели. В основу классификации положена степень абстрагирования модели от оригинала. Предварительно все модели можно подразделить на 2 группы — физические и абстрактные (математические).
Ф.М. обычно называют систему, эквивалентную или подобную оригиналу, но возможно имеющую другую физическую природу. Виды Ф.М.:
- натуральные;
- квазинатуральные;
- масштабные;
- аналоговые;
Натуральные модели — это реальные исследуемые системы (макеты, опытные образцы). Имеют полную адекватность (соответствия) с системой оригиналом, но дороги.
Квазинатуральные модели — совокупность натуральных и математических моделей. Этот вид используется тогда, когда модель части системы не может быть математической из-за сложности её описания (модель человека оператора) или когда часть системы должна быть исследована во взаимодействии с другими частями, но их ещё не существует или их включение очень дорого. (вычислительные полигоны, АСУ)
Масштабная модель — это система той же физической природы, что и оригинал, но отличается от него масштабами. Методологической основой масштабного моделирования является теория подобия. При проектировании ВС масштабные модели могут использоваться для анализа вариантов компоновочных решений.
Аналоговыми моделями называют системы, имеющие физическую природу, отличающуюся от оригинала, но сходные с оригиналом процессы функционирования. Для создания аналоговой модели требуется наличие математического описания изучаемой системы. В качестве аналоговых моделей используются механические, гидравлические, пневматические и электрические системы. Аналоговое моделирование использует при исследовании средства ВТ на уровне логических элементов и электрических цепей, а так же на системном уровне, когда функционирование системы описывается например, дифференциальными или алгебраическими уравнениями.
Математические модели.Математические модели представляют собой формализованное представление системы с помощью абстрактного языка, с помощью математических соотношений, отражающих процесс функционирования системы. Для составления математических моделей можно использовать любые математические средства — алгебраическое, дифференциальное, интегральное исчисления, теорию множеств, теорию алгоритмов и т.д. По существу вся математика создана для составления и исследования моделей объектов и процессов.
К средствам абстрактного описания систем относятся также языки химических формул, схем, чертежей, карт, диаграмм и т.п. Выбор вида модели определяется особенностями изучаемой системы и целями моделирования, т.к. исследование модели позволяет получить ответы на определённую группу вопросов. Для получения другой информации может потребоваться модель другого вида. Математическое модели можно классифицировать на детерминированные и вероятностные, аналитические, численные и имитационные.
Аналитической моделью называется такое формализованное описание системы, которое позволяет получить решение уравнения (1.2) в явном виде, используя известный математический аппарат.
Численная модель характеризуется зависимостью (1.2) такого вида, который допускает только частные решения для конкретных начальных условий и количественных параметров моделей.
Имитационная модель — это совокупность описания системы и внешних воздействий, алгоритмов функционирования системы или правил изменения состояния системы под влиянием внешних и внутренних возмущений. Эти алгоритмы и правила не дают возможности использования имеющихся математических методов аналитического и численного решения, но позволяют имитировать процесс функционирования системы и производить вычисления интересующих характеристик. Имитационные модели могут быть созданы для гораздо более широкого класса объектов и процессов, чем аналитические и численные. Поскольку для реализации имитационных моделей служат ВС, средствами формализованного описания ИМ служат универсальные и специальные алгоритмические языки. ИМ в наибольшей степени подходят для исследования ВС на системном уровне.
Язык программирования GPSS
Этот язык с 1968 года входит в математическое обеспечение машин фирмы IBM, один из наиболее популярных языков ИМ.
Общие сведения.
GPSS составлен из объектов и операций (логических правил). Объекты делятся на семь классов:
- динамические (ДО);
- аппаратно-ориентированные (АО);
- статические (СО);
- операционные (ОО);
- вычислительные (ВО);
- запоминающие (ЗО);
- группирующие (ГО).
До — элементы потока обслуживания заявки или "транзакты". Они создаются и уничтожаются, с каждым транзактом может быть связано некоторое число "параметров"
АО — соответствуют элементам оборудования, которые управляются ДО.
К ним относятся:
- накопители;
- устройства;
- логические переключатели.
СО:
- очереди;
- таблицы.
ЗО:
ячейки;
матрицы ячеек.
ГО:
- группы;
- списки.
ВО:
- арифметические и булевы переменные;
- функции.
Каждой очереди соответствует перечень транзактов, задержанных ы какой-либо точке системы и запись длительности этих задержек: Tз={tiз}.
Таблицы могут использоваться для построения распределений выбранных величин.
ОО - блоки – формируют логику системы, давая транзактам указания, куда идти дальше.
Для того чтобы смоделировать систему, необходимо составить её описание в терминах GPSS, затем симулятор генерирует транзакты, продвигает через заданные блоки и выполняет действия соответствующие блокам. Продвижение создаёт блок GENERATE. Каждое продвижение транзакта является событием, которое должно произойти в определённый момент времени. Симулятор регистрирует время наступления каждого события, затем производит обработку событий в правильной хронологической последовательности.
Если транзакты заблокированы, то симулятор продвинет их тогда, когда изменятся блокирующие правила. Симулятор моделирует часы, их показания в любой момент времени называют абсолютным временем. Относительное время показывает текущее время в модели. При помощи специальной операции относительное время может устанавливаться в нуль и последующий счёт времени будет производиться от этой точки. Другой операцией в нуль могут устанавливаться оба значения времени. Все времена в модели изображаются целыми числами. Симулятор рассчитывает схему по принципу ближайшего события. Центральной задачей симулятора является просмотр и проверка всех возможных событий. Транзакты входят в цепи. Существует пять видов цепей:
1) Цепь текущих событий включает в себя те транзакты, планируемое время наступления которых равно или меньше текущего часового.
2) Цепь будущих событий включает в себя транзакты, время которых не дошло для обслуживания.
3) Цепь прерванных событий.
4) Цепь парных транзактов – в текущий момент времени имеют статус парности (ожидают прибытия синхронизирующих транзактов).
5) Цепь пользователя включает транзакты, которые пользователь удалили из цепи текущих транзактов.
Цепь текущих событий организуется в порядке убывания приоритетов транзактов и в порядке очерёдности поступления.
В зависимости от различных условий и требований пользователь система помещает транзакты в те или иные цепи.
Программа на GPSS создаётся в текстовом редакторе в определённом формате. Формат ввода содержит 3 различные поля: поле метки (позиции 5-9), поле операции (позиции 13-23) и поле переменных (позиции 26-80). Поле переменных содержит подполя, которые обозначены A, B, C, D, …,H. Последующие отделяются от предыдущих запятыми. Пропущенное значение в поле переменных выделяется запятыми (кроме конца поля).
Каждый из объектов требует определённого числа ячеек ОЗУ, в которых во время моделирования хранятся атрибуты объекта (АТО). АТО, к которым может обращаться программист, называются стандартными числовыми атрибутами (СЧА). Все СЧА имеют одно- или 2-х буквенные мнемонические обозначения. Мнемонические обозначения указывают на тип СЧА, а целочисленное значение – на конкретный СЧА.
Номера блоков можно определять символическими обозначениями. При этом обозначение должно включать от 3-х до 5-ти знаков, отличных от пробела, первые три из которых должны быть буквами. Эти ограничения необходимы для того, чтобы избежать смешивания атрибутов системы и символов. Дополнительным ограничением является недопустимость таких специальных знаков, как "–", "+", " ² " и т.д.
Если в полях А, В, С блока представлены стандартные числовые атрибуты Nj или Wj, то необходимо, чтобы номер блока был представлен в качестве аргумента. Если этот номер блока определяется символически, то такое представление должно быть отличным от мнемонических обозначений, указанных СЧА (N или W). В префикса символического имени используется знак доллара $. Пользователь может относительную адресацию. В символической записи CROSS±n символ CROSS указывает на нужный блок, а число n–на номер блока, отсчитываемого от номера блока CROSS. При косвенной адресации предполагается, что нужный аргумент представлен некоторым параметром. Последний обозначается *, за которой следует целое число. Например, S*10 соответствует текущему значению накопителя, номер которого задан параметром 10 (буква S - означает накопитель). Косвенная адресация неприменима только для СЧА С1, М1, RNn.
Вычислительная категория
В вычислительной категории используются объекты 3-х видов: арифметические, логические, и функции. Арифметические объекты описываются блоком variable в режиме целых чисел и FVARIABLE в режиме с плавающей точкой. Название карты описывают арифметические действия над СЧА. Аргументы и результаты рассматриваются как целые числа. При вычислении используются операции: +, –, *, / (с отбрасыванием остатка, d - деление по модулю (остаток считается положительным ). Допускается использование не более 5-ти скобок.
FVARIABLE - описывает арифметические сочетания различных СЧА, вычисляемых в режиме с плавающей запятой. От аргументов и промежуточных результатов не берётся целая часть, а только от конечного результата.
Блок - BVARIABLE - логическое высказывание, состоящее из некоторой совокупности СЧА и логических атрибутов. При вычислении используется 3 типа операторов: логические, условные и булевы, например, 2 BVARIABLE М1 'LE' P6.
Функции описываются с помощью блока FUNCTION в виде совокупности диапазонов, например:
3 FUNCTION RN1,C5
0,0/.35,11/.42,1.7/.75,2.2/1.0,3.8
Статическая категория
К ней относятся блоки:
QUEUE - для занятия очереди;
DEPART - для освобождения из очереди;
TABULATE - для регистрации частоты попадания заданного СЧА;
TABLE - для вывода характеристик таблицы;
SAVEVALUE - для сохранения информации в специальных ячейках ОЗУ;
MSAVEVALUE - для сохранения информации в ячейках ОЗУ;
MATRIX - для описания матрицы;
INITIAL - для присвоения ячейкам и матрицам начальных значений.
Группирующая категория
К ней относятся блоки LINK и UNLINK, позволяющие переводить сообщения из списка текущих активных событий в списки пользователя неактивных событий и обратно. Использования списков позволяет моделировать различные дисциплины обслуживания событий.
Специальные типы блоков
Они используются для составления сложных моделей. К ним относятся блоки вывода статистики (PRINT, TRACE, UNTRACE), изменения модели (EXECUTE, CHANGE) блоки BUFFER и HELP, а так же блоки управления группами транзактов (JOIN, REMOVE, EXAMINE, SCAN, ALTER).
Блок BUFFER даёт возможность для немедленного прекращения обработки транзакта и возврата к началу списка текущих событий.
HELP - для составления пользователем независимых программ, которые могут взаимодействовать с GPSS.
JOIN - для включения транзакта или числового значения в группу.
REMOVE - обратная функция JOIN.
EXAMINE - предоставляет возможность пользователю выбора пути, по которому пойдёт транзакт в зависимости от того, принадлежит он группе или нет.
SCAN - для анализа получения значений атрибутов транзактов и изменения их пути.
ALTER - для изменения значений атрибутов транзактов из группы.
Примеры решения задач моделирования на GPSS
Пример 1. Моделирование непрерывной случайной величины распределённой по экспоненциальному закону с l = 0.1.
10 SIMULATE
20 EXPON FUNCTION RN1, C24
30 0.0/.1,.104/.2,.222/.3,.365/.4,.509/.5,.69
.6,.915/.7,1.2/.75,1.38/.8,1.6/.84,1.83/.88,2.12
.9,2.3/.92,2.52/.94,2.81/.95,2.99/.96,3.2/.97,3.5
.98,3.9/.99,4.6/.995,5.3/.995,6.2/.999,7.01.9997,8.0
40 GENERATE 10,FN$EXPON
50 MARK1
60 TABULATE XTIME
70 TERMINATE 1
80 XTIME TABLE P1,0,2,100
90 START 200
100 END
Модель включает 4 блока, выполняющие следующие функции:
40 - генерирование транзакта;
50 - присвоение параметру 1 транзакта значения, равного текущему значению часового времени;
60 - уничтожение транзакта;
10 - признак, необходимый для прогона модели;
20 - описание функции (EXPON - метка, RN1 - генератор случайной функции, число пар координат-24);
30 - задание значений пар координат функции;
80 - определение таблицы; XTIME - метка, табулируемой величиной является Р1 значение параметров последовательных транзактов, верхний предел первого интервала равен 0, ширина интервала - 2, общее число интервалов - 100;
90 - признак ввода данных, необходимый для выполнения моделирования; прогон модели должен завершится после прохождения через неё 200 транзактов;
100 - признак конца программы.
Пример 2. Составить модель композиции двух случайных величин X1 и X2 имеющих экспоненциальные распределения с параметрами l1 и l2 (Х= X1 + X2), удовлетворяющих обобщённому закону Эрланга 1-ого порядка: g(t)= l1l2(e-l1- e-l2)/(l1-l2).

Рис. 10.1. К задаче моделирования композиции 2-х случайных величин.
10 SIMULAT
20 EXPON FUNCTION RN1, C24
30 0.0/.1,.104/.2,.222/.3,.365/.4,.509/.5,.69
.6,.915/.7,1.2/.75,1.38/.8,1.6/.84,1.83/.88,2.12
.9,2.3/.92,2.52/.94,2.81/.95,2.99/.96,3.2/.97,3.5
.98,3.9/.99,4.6/.995,5.3/.995,6.2/.999,7.01.9997,8.0
40 GENERATE 0,0,,1
50 ASSIGN 1,K500
60 INPUT ADVANCE 10,FN$EXPON
70 ADVANCE 20, FN$EXPON
80 TABULATE XTIME
90 LOOP 1,INPUT
100 TERMINATE 1
110 XTIME TABLE M1,0,5,100
120 START 1
130 END.
Функции блоков:
40 - генерирование 1-ого транзакта в момент времени t=0;
50 - присвоение параметру 1 значения, равного 500;
60 - моделирование экспоненциального распределённых временных интервалов с параметром l1;
70 - моделирование экспоненциального распределённых временных интервалов с параметром l2;
80 - формирование таблиц частот XTIME для суммарных интервалов;
90 - контроль числа прохождений транзактов через сегмент блоков, начинающийся с блока INPUT;
100 - уничтожение транзакта.
Пример 3. Моделирование однолинейной системы с пуассоновским входящим потоком с параметром l = 0.1 1/сек. И экспоненциальным временем обслуживания с параметром m = 0.2 1/сек.
10 SIMULATE
20 LINE EQU 1
30 EXPON FUNCTION RN1,C24
40 0.0/.1,.104/.2,.222/.3,.365/.4,.509/.5,.69
.6,.915/.7,1.2/.75,1.38/.8,1.6/.84,1.83/.88,2.12
.9,2.3/.92,2.52/.94,2.81/.95,2.99/.96,3.2/.97,3.5
.98,3.9/.99,4.6/.995,5.3/.995,6.2/.999,7.01.9997,8.0
50 GENERATE 10, FN$EXPON
60 ASSIGN 1,LINE
70 QUEUE O1
80 SEIZE LINE
90 DEPART O1
100 ADVANCE 5,FN$EXPON
110 RELEASE LINE
120 TABULATE XTIME
130 TERMINATE 1
140 XTIME TABLE M1,0,10,100
150 START 500
160 END.
9 блоков: 50 - генерирование транзактов;
60 - назначение параметру 1 транзакта номера, соответствующего прибору LINE;
70 - вхождение транзакта в очередь на прибор;
80 - занятие прибора;
90 - выход из очереди;
100 - моделирование обслуживания;
110 - освобождения прибора;
120 - формирование таблицы частот XTIME для времени прохождения транзакта;
130 - уничтожение транзакта;
20 - назначение величины 1 переменной LINE.
Пример 4. Моделирование работы однолинейной системы, имеющей 3 Пуассоновских потока требований с относительными приоритетами и параметрами l1=0.01 1/сек., l2=0.04 1/сек., l3=0.05 1/сек. Экспоненциальный закон обслуживания m1=0.2 1/сек.
10 SIMULATE
20 LINE EQU 1
30 EX FUNCTION
40 0.0/.1,.104/.2,.222/.3,.365/.4,.509/.5,.69
.6,.915/.7,1.2/.75,1.38/.8,1.6/.84,1.83/.88,2.12
.9,2.3/.92,2.52/.94,2.81/.95,2.99/.96,3.2/.97,3.5
.98,3.9/.99,4.6/.995,5.3/.995,6.2/.999,7.01.9997,8.0
50 GENERATE 100, FN$EX,,,3
60 TRANSFER ,INPUT
70 GENERATE 25, FN$EX,,,2
80 TRANSFER ,INPUT
90 GENERATE 20, FN$EX,,,1
100 INPUT ASSIGN 1,LINE
110 QUEUE LINE
120 SEIZE LINE
130 DEPART LINE
140 ADVANCE 5,FN$EX
150 RELEASE LINE
160 TERMINATE 1
170 START 1000
60, 80 - безусловная передача транзактов;
50, 70, 90 - генерирование транзактов с приоритетами 3, 2, 1.
Планирование машинных экспериментов с моделями систем.
11.1 Методы планирования эксперимента на модели.
Основная задача планирования машинных экспериментов заключается в получении необходимой информации об исследуемой системе при ограниченных ресурсах (затраты машинного времени, памяти и т.п.). К числу частных задач, решаемых при планировании машинных экспериментов, относятся задачи уменьшения затрат машинного времени на моделирование, уменьшения погрешности результатов моделирования, проверки адекватности модели и т.п.
Эффективность машинных экспериментов существенно зависит от выбора плана эксперимента, т.к. именно план определяет объём и порядок проведения вычислений на ЭВМ, приёмы накопления и статистической обработки результатов моделирования системы. Поэтому основная задача планирования машинных экспериментов с моделью формируется следующим образом: необходимо получить об объёме моделирования, заданном в виде моделирующего алгоритма (программы) при минимальных или ограниченных затратах машинных ресурсов на реализацию процесса моделирования.
Таким образом, при машинном моделировании необходимо не только рационально планировать и проектировать саму модель системы, но и процесс её использования, т.е. проведения с ней эксперимента.
При планировании машинных экспериментов возникает целый ряд проблем, взаимно связанных как с особенностью функционирования моделируемого объекта, так и с особенностью машинной реализации модели и обработки результатов эксперимента. В первую очередь к таким относятся проблемы построения плана машинного эксперимента, стохастической сходимости результатов, ограниченности машинных ресурсов, уменьшения дисперсии оценок, полученных на машинной модели и т.д.
Рассмотрим основные понятия теории планирования эксперимента. В планировании эксперимента различают входные (изогенные) и выходные (эндогенные) переменные: х1, х2,…, хк; y1, y2…, ye. Входные переменные в ТПЭ называют факторами а выходные — реакциями. Каждый фактор xi, i=1,2,…,k может принимать в эксперименте одно или несколько значений, называемых уровнями. Фиксированный набор уровней факторов определяет одно из возможных состояний рассматриваемой системы. Одновременно этот набор представляет собой условия проведения одного из возможных экспериментов.
Каждому фиксированному набору уровню факторов соответствует определённая точка в многомерном пространстве, называемая факторным пространством. Эксперименты не могут быть реализованы во всех точках факторного пространства, а лишь в принадлежащих допустимой области, как это например оказано для случая двух факторов Х1 и Х2 на рисунке (см. ниже рис. 11.1.).
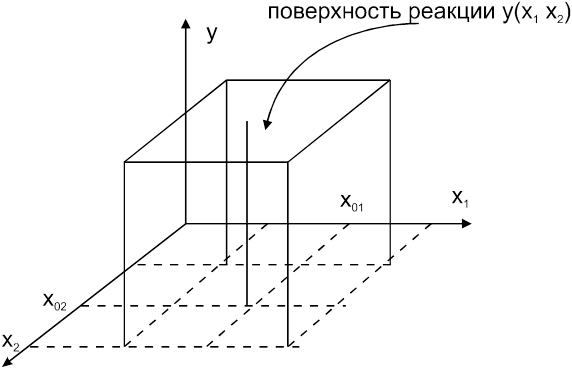
Рис. 11.1. Геометрическое представление поверхности реакции.
Реакцию (отклик) системы можно представить в виде зависимости: yl=Yl(x1, x2,…,xk); e=1…m. Функцию Ye, связанную с факторами, называют функцией отклика, а её геометрический образ – поверхностью отклика. Исследователь заранее не известен вид зависимостей Yl, l=1…m, поэтому используют приближение соотношения: 
Зависимость и Yl находятся по данным эксперимента. Последний необходимо поставить так, чтобы при минимальных затратах ресурсов (числе испытаний), варьируя выходные значения по специально сформулированным правилам, построить математическую модель системы и оценить её характеристики. Факторы при проведении эксперимента могут быть управляемыми и неуправляемыми, количественными или качественными, фиксированными и случайными. Фактор относится к изучаемым, если он включён в модель для изучения свойств системы. Количественными факторами являются интенсивности входящих потоков заявок, интенсивности потоков обслуживания, ёмкости накопителей, количество обслуживающих каналов и другие. Качественным факторам не соответствует числовая шкала (дисциплины постановки на очередь, обслуживание каналов и другие).
Фактор является управляемым, если его уровни целенаправленно выбираются экспериментатором.
При планировании эксперимента обычно изменяются несколько факторов.
Основными требованиями, предъявляемыми к факторам - независимость и совместимость. Совместимость означает, что все комбинации факторов осуществимы.
Для выбора конкретной модели планирования эксперимента необходимо сформулировать такие её особенности, как адекватность, содержательность, простота.
План эксперимента обычно используется для определения экстремальной характеристики объекта. Поэтому планирование эксперимента называется экстремальным. В планировании эксперимента наибольшее значение нашли модели в виде алгебраических полиномов.
Предполагаем, что изучается влияние К количественных факторов хi на некоторую h в отведённый для экспериментирования локальной области факторного пространства ограниченного хi min—xi max, i=1…k.
Функцию отклика обычно выбирают линейной или квадратичной.
 (1)
(1)
где  вектор с элементами
вектор с элементами  , входящих в исходный полином;
, входящих в исходный полином;  - вектор коэффициентов. Для двух факторов имеем: f0=1, f1=x1, f2=x2, f12=x1x2, f11=x12, f22=x22.
- вектор коэффициентов. Для двух факторов имеем: f0=1, f1=x1, f2=x2, f12=x1x2, f11=x12, f22=x22.  (b0,b1,b2,b12,b11,b22).
(b0,b1,b2,b12,b11,b22).
Так как полином (1) содержит d коэффициентов, то план эксперимента должен содержать N³d различных экспериментальных точек:

где xin - значение, которое принимает i-ая переменная в u-ом испытании. i=1…k, u=1...N. Матрица D называется планом эксперимента.
Реализовав испытания в N очках области факторного пространства, определённом планом эксперимента, получим вектор наблюдений имеющий следующий вид:
где yu - реакция соответствующей u-ой точке плана.
Плану эксперимента поставим в соответствие матрицу планирования:

где fil, fijl - координатные функции при соответствующих коэффициентах модели, в l - ом эксперименте.
Построению плана эксперимента предшествует проведение ряда неформализованных действий (принятия решения) направленных на выбор локальной области факторного пространства G.
Необходимо учитывать, что как только модель сформирована включение дополнительных факторов для уточнения модели невозможно. Вначале следует выбрать границы xi min и xi max области определения факторов исходя из свойств объекта. Например, температура при термобарических экспериментах не может быть ниже абсолютного нуля и выше температуры плавления материала из которого изготовлена термобарокамера.
После определения области G необходимо найти нулевые (основные) уровни факторов и интервалы варьирования Dxi, i=1…k.
Эксперимент, в котором реализуются все возможные сочетания уровней факторов, называется полным факторным экспериментом (ПЭФ). Если выбранная модель включает только линейные члены полинома и их произведения, то для оценки коэффициентов модели используется ПЭ с варьированием всех k факторов на двух уровнях, т.е. q=2. Такие планы называются планы типа 2k, где n=2k- число всех возможных испытаний.
Начальным этапом ПЭ для получения коэффициентов линейной модели основан на варьировании факторов на двух уровнях: нижнем xiн и верхнем xiв, симметрично расположенных относительно основного уровня xi0, i=1…k. Геометрическая интерпретация показана ниже на рис. 11.2.:

Рис. 11.2. ПЭФ типа 22.
Для упрощения записи условий каждого эксперимента факторы кодируют в виде безразмерных величин  .Средний уровень кодированного фактора является нулём 0, граничные значения соответственно +1 и -1.
.Средний уровень кодированного фактора является нулём 0, граничные значения соответственно +1 и -1.
11.2 Стратегическое планирование машинных экспериментов с моделями систем
Можно выделить стратегическое и тактическое ПЭ на моделях систем.
Стратегическое планирование – ставит своей целью получение необходимой информации о системе S с помощью модели MM, реализованной на ЭВМ. Оно аналогично внешнему проектированию при создании системы S.
Тактическое планирование – определяет способы проведения каждой серии испытаний машинной модели MM. Оно аналогично внутреннему проектированию системы S.
Рассмотрим элементы стратегического планирования ПЭ. Его целью может быть:
1. Получение функции реакции системы от независимых фактов: y=f(b0,b1…,x1,x2,…xk)
2. Нахождение экстремума: f(b0,b1…,x1,x2,…xk).
Во 2-ом случае для определения наилучшей комбинации фактов могут быть использованы методы систематической или случайной выборки.
К систематическим относятся методы:
- одного фактора;
- предельного анализа;
- наискорейшего спуска;
- равномерной сетки.
Проблемой является большое количество факторов. Для k=10 ПЭФ должен состоять из 1024 точек. Используют неполные планы, метод "поверхности реакции".
Следующей проблемой является многокомпонентность функции реакции. Здесь можно использовать последовательное однокомпонентное ПЭ. Этот подход не всегда возможен из-за связанности компонентов. Используются интегральные оценки с применением весовых функций, функций полезности и т.д.
Другой проблемой является стохастическая сходимость результатов ПЭ. В качестве результатов ПЭ используется средние некоторых распределений, для оценки которых применяют выборочные средние, найденные путём многократны прогонов модели на ЭВМ. Сходимость выборочных средних с ростом объема выборки называется стохастической. Эта сходимость, как правило, медленная. Если s - стандартное отклонение среднего N наблюдений будет равно s/  , т.е. для уменьшения случайной выборки в k раз требуется увеличить объем выборки в k2 раз.
, т.е. для уменьшения случайной выборки в k раз требуется увеличить объем выборки в k2 раз.
Планирование машинного эксперимента представляет собой итерационный процесс, когда выбранная модель плана эксперимента проверяется на реализуемость, а затем, если это необходимо, вносят соответствующие коррективы в модель.
Планирование эксперимента с моделью проводится в несколько этапов:
1) построение структурной модели;
2) построение функциональной модели.
Структурная модель ПЭ характеризуется числом факторов и числом уровней для каждого фактора. Из опыта известно, что 20% факторов определяют 80% свойств системы.
Ортогональное распределение плана упрощает определение коэффициентов аппроксимации. Упрощение дает принятие числа уровней всех факторов одинаковыми (не больше 3). Функциональная модель ПЭ определяет количество элементов структурной модели Nф, т.е. необходимое число различных информационных точек Nф. Причём Nф<Nс, где Nс=q1,q2…qk – число экспериментов ПФЭ.
11.3 Тактическое планирование машинных экспериментов с моделями систем
Здесь решают проблемы:
- определения начальных условий и их влияния на достижения установившегося результата при моделировании;
- обеспечения точности и достоверности результатов моделирования;
- уменьшения дисперсии оценок характеристик процесса функционирования моделируемых систем;
- выбора правил автоматической остановки имитационного эксперимента с моделями.
Рассмотрим ПФЭ типа 23:
| номер испытания | ||||||||

| -1 | -1 | -1 | -1 | +1 | +1 | +1 | +1 |

| -1 | -1 | +1 | +1 | -1 | -1 | +1 | +1 |

| -1 | +1 | -1 | -1 | -1 | +1 | -1 | +1 |
ПЭФ даёт возможность определить не только коэффициенты регрессии, соответствующие линейным эффектам, но и коэффициенты регрессии соответствующие всем эффектам взаимодействия. Эффект взаимодействия двух или более факторов появляется при одновременном варьировании этих факторов, когда действие каждого из них на выход зависит от уровня, на которых находятся другие факторы.
Для оценки свободного члена b0 и определения эффектов взаимодействия b12, b13, …,b123… план эксперимента D расширяют до матрицы планирования X путём добавления соответствующей фиктивной переменной: единичного столбца  и столбцов произведений
и столбцов произведений  как показано, например, для ПЭФ типа 23 в таблице (см. ниже):
как показано, например, для ПЭФ типа 23 в таблице (см. ниже):
| Номер испытания |
| План ПЭФ | 
| 
| 
| 
| Реакция y | ||
|
| 
|
| |||||||
| +1 | +1 | +1 | +1 | + | + | + | + | y1 | |
| +1 | –1 | +1 | +1 | – | – | + | – | y2 | |
| +1 | +1 | –1 | +1 | – | + | – | – | y3 | |
| +1 | –1 | –1 | +1 | + | – | – | + | y4 | |
| +1 | +1 | +1 | –1 | + | – | – | – | y5 | |
| +1 | –1 | +1 | –1 | – | + | – | + | y6 | |
| +1 | +1 | –1 | –1 | – | – | + | + | y7 | |
| +1 | –1 | –1 | –1 | + | + | + | – | y8 |
Как видно из рассмотренных ПЭ типа 22 b 23 количество испытаний ПЭФ значительно превосходит число определяемых коэффициентов линейной модели плана эксперимента, что увеличивает расход ресурсов ЭВМ по времени. Возникает проблема сокращения количества экспериментов.
С этой целью рассмотрим построение планов так называемого дробного факторного эксперимента (ДФЭ). Пусть имеется ПЭФ типа 22. Используя матрицу планирования X, например приведённую в предыдущей таблице, можно вычислить коэффициенты и предусмотреть результаты в виде уравнения:

| N/n |
| План ПЭФ | 
| Отклик y | |
|
|
| ||||
| +1 | +1 | +1 | y1 | ||
| –1 | +1 | –1 | y2 | ||
| +1 | –1 | –1 | y3 | ||
| –1 | –1 | +1 | y4 |
Если в выбранных интервалах варьирования уровня процесс можно описать линейной моделью, то достаточно определить три коэффициента b0, b1,b2. Т.о. остаётся одна степен
Последнее изменение этой страницы: 2017-07-22
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...