Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Конструкция и принцип действия.
Холостой ход однофазного трансформатора.
Ответ:Приведенные при рассмотрении принципа действии трансформатора соотношения справедливы лишь для идеального трансформатора, в котором пренебрегают сопротивлениями обмоток и потерями в сердечнике и считают, что магнитный поток замыкается только по сердечнику. В реальных условиях необходимо учитывать падения напряжения в обмотках и фактическую картину распределения магнитных полей. В частности, при холостом ходе МДС F0 кроме основного магнитного потока взаимоиндукции Ф0, замыкающегося по сердечнику, создает магнитный поток рассеяния Фрс1, который замыкается, в основном, по воздуху и сцепляется только с первичной обмоткой (рис. 1).

Рис. 1 — Холостой ход однофазного трансформатора. Под действием этого магнитного потока в первичной обмотке индуктируется ЭДС самоиндукции ерс1, действующее значение которой обычно рассчитывают по соотношению  где хрс1 — индуктивное сопротивление рассеяния первичной обмотки. Для упрощения записи это сопротивление часто обозначают просто х1 Оно равно
где хрс1 — индуктивное сопротивление рассеяния первичной обмотки. Для упрощения записи это сопротивление часто обозначают просто х1 Оно равно  где L1 — индуктивность рассеяния, определяемая по специальным формулам. Таким образом, реально существующий магнитный поток рассеяния Фрс1 первичной обмотки и соответствующая ему ЭДС Ерс1 учитываются путем введения некоторого индуктивного сопротивления рассеяния х1, падение напряжения на котором уравновешивает ЭДС, т.е. в векторной форме равенство записывают в виде
где L1 — индуктивность рассеяния, определяемая по специальным формулам. Таким образом, реально существующий магнитный поток рассеяния Фрс1 первичной обмотки и соответствующая ему ЭДС Ерс1 учитываются путем введения некоторого индуктивного сопротивления рассеяния х1, падение напряжения на котором уравновешивает ЭДС, т.е. в векторной форме равенство записывают в виде  Такой подход значительно упрощает анализ и расчет режимов работы трансформатора. Сопротивление х1практически постоянно, а величина Ерс1 пропорциональна току первичной обмотки. Полное сопротивление первичной обмотки, кроме сопротивления х1 учитывает также активное сопротивление r1, т.е.
Такой подход значительно упрощает анализ и расчет режимов работы трансформатора. Сопротивление х1практически постоянно, а величина Ерс1 пропорциональна току первичной обмотки. Полное сопротивление первичной обмотки, кроме сопротивления х1 учитывает также активное сопротивление r1, т.е.  Электрическая схема замещения фазы первичной обмотки трансформатора на холостом ходу полностью аналогична схеме замещения катушки со стальным сердечником (рис. 2).
Электрическая схема замещения фазы первичной обмотки трансформатора на холостом ходу полностью аналогична схеме замещения катушки со стальным сердечником (рис. 2).
 Рис. 2 — Электрическая схема замещения фазы трансформатора на холостом ходу.
Рис. 2 — Электрическая схема замещения фазы трансформатора на холостом ходу.
Уравнение электрического равновесия трансформатора для режима холостого хода может быть записано в виде  или
или  Таким образом, подводимое к первичной обмотке напряжение уравновешивается ЭДС самоиндукции Е10 и падением напряжения на сопротивлениях r1 и х1 обмотки. Поскольку падение напряжения достаточно мало, последнее уравнение для режима холостого хода часто записывают в виде
Таким образом, подводимое к первичной обмотке напряжение уравновешивается ЭДС самоиндукции Е10 и падением напряжения на сопротивлениях r1 и х1 обмотки. Поскольку падение напряжения достаточно мало, последнее уравнение для режима холостого хода часто записывают в виде  Векторная диаграмма трансформатора в режиме холостого хода является графической иллюстрацией и решением уравнений ; Векторы
Векторная диаграмма трансформатора в режиме холостого хода является графической иллюстрацией и решением уравнений ; Векторы  как это следует из уравнений
как это следует из уравнений
 отстают от вектора Фом на 90° (рис.3). Величина напряжения U20 =Е20 отличается от Е10 в отношении коэффициента трансформации. Ток холостого хода I0 не синусоидален и его представляют в виде двух составляющих: I0а — активной, определяющей потери энергии в стали сердечника и в обмотке; I0р — реактивной, необходимой для создания МДС F0 и потоков Ф0 и Фрс1.
отстают от вектора Фом на 90° (рис.3). Величина напряжения U20 =Е20 отличается от Е10 в отношении коэффициента трансформации. Ток холостого хода I0 не синусоидален и его представляют в виде двух составляющих: I0а — активной, определяющей потери энергии в стали сердечника и в обмотке; I0р — реактивной, необходимой для создания МДС F0 и потоков Ф0 и Фрс1.
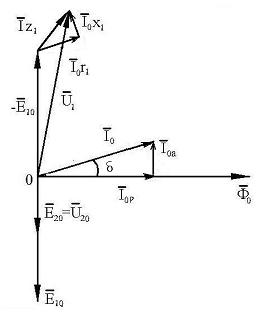
Рис. 3 — Векторная диаграмма холостого хода трансформатора. Таким образом, можно записать  . Обычно I0а<< I0р и приближенно считают, что в режиме холостого хода ток I0, в основном, намагничивающий, т.е. I0 ≈ I0р. В целом вектор тока опережает вектор Фо на некоторый угол δ, называемый углом потерь
. Обычно I0а<< I0р и приближенно считают, что в режиме холостого хода ток I0, в основном, намагничивающий, т.е. I0 ≈ I0р. В целом вектор тока опережает вектор Фо на некоторый угол δ, называемый углом потерь  где rm и xm – активное и индуктивное сопротивления ветви намагничивания. Следует отметить, что на рис. 3 векторы
где rm и xm – активное и индуктивное сопротивления ветви намагничивания. Следует отметить, что на рис. 3 векторы  показаны для наглядности в сильно увеличенном масштабе.
показаны для наглядности в сильно увеличенном масштабе.
Работа под нагрузкой.
Ответ:Нагрузочным или рабочим называется режим работы трансформатора, при котором к первичной обмотке подведено напряжение U1, а к вторичной подключены потребители ZН (рис. 1), так что I2 > 0.

Рис. 1 — Нагрузочный режим однофазного трансформатора.
Это основной режим, при котором вторичный ток изменяется в пределах 0<I2 ≤ I2Н , а коэффициент мощности cosφ2 определяется характером нагрузки и может изменяться от нуля до 1,0. Особенности взаимодействий в рабочем режиме трансформатора определяются тем, что ток I2 создает МДС F2 = I2W2 и соответствующий магнитный поток Ф2, действующие встречно по отношению к МДС F1 и потоку Ф0, т.е. в соответствии с принципом Ленца реакция вторичной обмотки направлена на уменьшение основного магнитного потока взаимоиндукции Ф0, созданного при холостом ходе. Однако, поскольку подводимое к первичной обмотке напряжение не изменяется, а оно, в основном, уравновешивается ЭДС Е10, то поток Ф0 не должен изменяться, что соответствует уравнению равновесия:  Для поддержания неизменным магнитного потока при переходе от холостого хода трансформатора к нагрузке МДС I0W1 первичной обмотки увеличивается до такой величины I1W1, при которой компенсируется размагничивающее действие МДС вторичной обмотки I2W2. При этом закон Ома для магнитной цепи трансформатора в рабочем режиме записывается в виде:
Для поддержания неизменным магнитного потока при переходе от холостого хода трансформатора к нагрузке МДС I0W1 первичной обмотки увеличивается до такой величины I1W1, при которой компенсируется размагничивающее действие МДС вторичной обмотки I2W2. При этом закон Ома для магнитной цепи трансформатора в рабочем режиме записывается в виде:  Левые части соотношений одинаковы, поэтому справедливо равенство:
Левые части соотношений одинаковы, поэтому справедливо равенство:  которое называют уравнением равновесия МДС трансформатора.
которое называют уравнением равновесия МДС трансформатора.
Из последнего равенства получают уравнения равновесия токов, которые записывают в виде: или  При нагрузках, близких к номинальной, током холостого хода иногда пренебрегают и уравнение второе уравнение упрощается:
При нагрузках, близких к номинальной, током холостого хода иногда пренебрегают и уравнение второе уравнение упрощается:  откуда следует соотношение:
откуда следует соотношение:  . Таким образом, соотношение токов при нагрузках, близких к номинальной, определяется соотношением числа витков, причем оно обратно пропорционально коэффициенту трансформации. Поэтому для номинального режима можно записать приближенное равенство:
. Таким образом, соотношение токов при нагрузках, близких к номинальной, определяется соотношением числа витков, причем оно обратно пропорционально коэффициенту трансформации. Поэтому для номинального режима можно записать приближенное равенство:  из которого следует, что полная мощность, потребляемая трансформатором из сети, примерно равна полной мощности, отдаваемой потребителю. Схема замещения первичной обмотки при переходе от режима холостого хода к нагрузке не изменяется, однако первичный ток увеличивается до значения I1 (рис.2, а), что должно найти отражение в уравнении равновесия ЭДС первичной обмотки при нагрузке:
из которого следует, что полная мощность, потребляемая трансформатором из сети, примерно равна полной мощности, отдаваемой потребителю. Схема замещения первичной обмотки при переходе от режима холостого хода к нагрузке не изменяется, однако первичный ток увеличивается до значения I1 (рис.2, а), что должно найти отражение в уравнении равновесия ЭДС первичной обмотки при нагрузке:  Ток вторичной обмотки подобно току первичной обмотки создает магнитный поток рассеяния Фрс2, действие которого учитывается или величиной ЭДС самоиндукции Ерс2, или уравновешивающим ее падениемнапряжения I2x2, на индуктивном сопротивлении рассеяния
Ток вторичной обмотки подобно току первичной обмотки создает магнитный поток рассеяния Фрс2, действие которого учитывается или величиной ЭДС самоиндукции Ерс2, или уравновешивающим ее падениемнапряжения I2x2, на индуктивном сопротивлении рассеяния  где L2 — индуктивность рассеяния вторичной обмотки.
где L2 — индуктивность рассеяния вторичной обмотки.

Рис. 2 — Схемы замещения первичной (а) и вторичной (б) обмоток трансформатора при нагрузке
Электрическая схема замещения вторичной обмотки показана на рис.2, б, на которой r2 — её активное сопротивление, а полное сопротивление нагрузки: 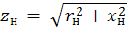 Уравнение электрического равновесия вторичной обмотки при нагрузке имеет вид:
Уравнение электрического равновесия вторичной обмотки при нагрузке имеет вид:  Это уравнение источника электрической энергии, что и представляет собой трансформатор по отношению к нагрузке. Как видно, при работе под нагрузкой напряжение на нагрузке отличается от ЭДС Е2 на величину падения напряжения на внутренних сопротивлениях вторичной обмотки. Следует отметить, что соотношение между ЭДС Е2 и напряжением U2 зависит также от характера нагрузки, о чем будет сказано ниже. Векторные диаграммы первичной и вторичной обмоток являются графическим решением уравнений:
Это уравнение источника электрической энергии, что и представляет собой трансформатор по отношению к нагрузке. Как видно, при работе под нагрузкой напряжение на нагрузке отличается от ЭДС Е2 на величину падения напряжения на внутренних сопротивлениях вторичной обмотки. Следует отметить, что соотношение между ЭДС Е2 и напряжением U2 зависит также от характера нагрузки, о чем будет сказано ниже. Векторные диаграммы первичной и вторичной обмоток являются графическим решением уравнений:
Для вторичной обмотки (рис. 3, б) сдвиг по фазе между током I2 и напряжением U2 , (угол φ2) определяется соотношением параметров нагрузки:  а угол ψ2 — соотношением реактивных и активных сопротивлений вторичной обмотки и нагрузки, т.е.
а угол ψ2 — соотношением реактивных и активных сопротивлений вторичной обмотки и нагрузки, т.е. 

Рис. 3 — Векторные диаграммы первичной (а) и вторичной (б) обмоток трансформатора
На рис.3 векторные диаграммы изображены для случая активно-индуктивной нагрузки.На векторной диаграмме первичной обмотки (рис. 3, а) вектор тока  получают, пристраивая к вектору тока холостого хода
получают, пристраивая к вектору тока холостого хода  вектор тока
вектор тока  измененный в отношении 1/к и повернутый на 180°, т.е. вектор
измененный в отношении 1/к и повернутый на 180°, т.е. вектор  Построение вектора первичного напряжения U1 аналогично построению для режима холостого хода, однако векторы падений напряжения
Построение вектора первичного напряжения U1 аналогично построению для режима холостого хода, однако векторы падений напряжения  ориентируются по отношению к вектору тока . Сдвиг по фазе между током I1 и напряжением U1 обозначают φ1. Угол φ1, определяет, как известно, при заданных значениях тока и напряжения, подводимую к трансформатору от сети активную P1 = U1I1cosφ1 и реактивную Q1 = U1I1sinφ1 мощности. Чем больше угол φ1, тем меньше активная и тем больше реактивная мощности.
ориентируются по отношению к вектору тока . Сдвиг по фазе между током I1 и напряжением U1 обозначают φ1. Угол φ1, определяет, как известно, при заданных значениях тока и напряжения, подводимую к трансформатору от сети активную P1 = U1I1cosφ1 и реактивную Q1 = U1I1sinφ1 мощности. Чем больше угол φ1, тем меньше активная и тем больше реактивная мощности.
Ответ:
 Трансформирование в трехфазной цепи может быть осуществлено либо группой, состоящей из трех однофазных трансформаторов, либо одним трехфазным трансформатором. В обоих случаях обмотки фаз высшего и низшего напряжений могут соединяться звездой или треугольником. Соединение звездой обозначается знаком Y, а треугольником —
Трансформирование в трехфазной цепи может быть осуществлено либо группой, состоящей из трех однофазных трансформаторов, либо одним трехфазным трансформатором. В обоих случаях обмотки фаз высшего и низшего напряжений могут соединяться звездой или треугольником. Соединение звездой обозначается знаком Y, а треугольником —  . Если обе обмотки соединены звездой, то такое соединение обозначается Y/Y. В числителе указывается способ соединения обмоток фаз высшего напряжения, а в знаменателе — низшего напряжения. Начала фаз высшего напряжения обозначаются буквами A, В и С, а концы — буквами X,У, Z. Начала фаз низшего напряжения — буквами а, b и с, а их концы — буквами х, у, z. На рис. 2.17 показана схема трех однофазных трансформаторов при соединении
. Если обе обмотки соединены звездой, то такое соединение обозначается Y/Y. В числителе указывается способ соединения обмоток фаз высшего напряжения, а в знаменателе — низшего напряжения. Начала фаз высшего напряжения обозначаются буквами A, В и С, а концы — буквами X,У, Z. Начала фаз низшего напряжения — буквами а, b и с, а их концы — буквами х, у, z. На рис. 2.17 показана схема трех однофазных трансформаторов при соединении  , т.е. фазы высшего напряжения соединены звездой, а фазы низшего напряжения — треугольником. Устройство и особенности трехфазных трансформаторов:Обмотки трехфазного трансформатора расположены на стержнях так же, как и в однофазном трансформаторе, т.е. обмотки низшего напряжения НН размещаются ближе к стержню, а обмотки
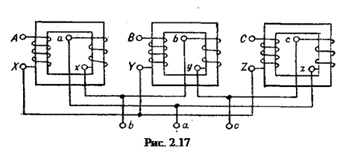
, т.е. фазы высшего напряжения соединены звездой, а фазы низшего напряжения — треугольником. Устройство и особенности трехфазных трансформаторов:Обмотки трехфазного трансформатора расположены на стержнях так же, как и в однофазном трансформаторе, т.е. обмотки низшего напряжения НН размещаются ближе к стержню, а обмотки  высшего напряжения ВН—на обмотках низшего напряжения. На рис. 2.18 показано соединение обмоток трехфазного трансформаторапосхеме (для наглядности обмотки расположены одна над другой).
высшего напряжения ВН—на обмотках низшего напряжения. На рис. 2.18 показано соединение обмоток трехфазного трансформаторапосхеме (для наглядности обмотки расположены одна над другой).
Для правильного соединения обмоток необходимо разметить начала и концы фаз высшего напряжения (A, В, Си X,У, Z) и низшего напряжения (а, b, с и х, у, z) и придерживаться этой маркировки. Ошибка в маркировке одной из фаз или ошибка в соединении фаз может привести к тому, что ЭДС, наведенные в одноименных фазах, будут не совпадать по фазе, а будут сдвинуты относительно друг друга на 180°. В трехфазных трансформаторах, кроме гальванической связи фаз, есть и магнитная, так как магнитопроводы отдельных фаз объединены в общую магнитную систему (рис. 2.18). Такое объединение возможно благодаря тому, что магнитные потоки в отдельных фазах сдвинуты по фазе относительно друг друга на угол 120°. Если объединить стержни трех фаз (рис. 2.19, а) в один общий стержень (рис. 2.19,б), то сумма трех потоков в нем в любой момент времени равна нулю  и, следовательно, стержень не нужен (рис. 2.19, в). Таким образом, магнитная система трехфазного трансформатора из шестистержневой модифицируется в трехстержневую (рис. 2.19, г и 2.18). Трехфазный трансформатор экономичнее, чем группа из трех однофазных.
и, следовательно, стержень не нужен (рис. 2.19, в). Таким образом, магнитная система трехфазного трансформатора из шестистержневой модифицируется в трехстержневую (рис. 2.19, г и 2.18). Трехфазный трансформатор экономичнее, чем группа из трех однофазных.

Рис. 2.19
Группа соединений обмоток: На рис. 2.20, а, б показаны соединение обмоток Y/Y, т.е. звезда-звезда, и топографическая диаграмма фазных и линейных напряжений. Напряжения  и
и  ,
,  и
и  и т.д. совпадают по фазе (считаем, что можно пренебречь активными падениями напряжений и ЭДС рассеяния обмоток). При другой схеме соединения обмоток Y/Y (рис. 2.21, а) напряжения и
и т.д. совпадают по фазе (считаем, что можно пренебречь активными падениями напряжений и ЭДС рассеяния обмоток). При другой схеме соединения обмоток Y/Y (рис. 2.21, а) напряжения и  , и
, и  , и т.д. находятся в противофазе (рис. 2.21,б), т.е. сдвинуты по фазе относительно друг друга на угол 180°.
, и т.д. находятся в противофазе (рис. 2.21,б), т.е. сдвинуты по фазе относительно друг друга на угол 180°.
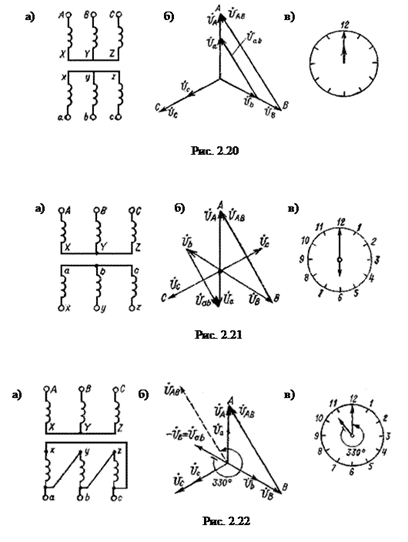
Угол сдвига фаз между линейными одноименными напряжениями определяет так называемую группу соединения обмоток. Этот угол записывается в соответствии с расположением стрелок часов. Если минутную стрелку направить к цифре 12 (0), а часовую к одной из цифр 1, 2, 3, … …, 11, 12 (0), то получим соответствующий угол или группу соединений. На рис. 2.20,вчасовая стрелка, как и минутная, показывает цифру 12(0) и группа (рис. 2.20, а) записывается так: Y/Y — 0, а на рис. 2.21, вчасовая стрелка направлена к цифре 6 и группа (рис. 2.21,а) записывается так: Y/Y — 6. Если обмотки трансформатора соединены по схеме, показанной на рис. 2.22,а, т.е. по схеме (вторичные обмотки соединены треугольником), то, как это видно из рис. 2.22,б и в, угол сдвига фаз между напряжениями и составляет 330°, поэтому группа соединений обмоток записывается так:  . Номинальные данные трехфазных трансформаторов: Номинальные данные трехфазных трансформаторов указываются в паспорте и на специальном щитке трансформатора. К ним относятся
. Номинальные данные трехфазных трансформаторов: Номинальные данные трехфазных трансформаторов указываются в паспорте и на специальном щитке трансформатора. К ним относятся  , схема и группа соединений. Здесь
, схема и группа соединений. Здесь  — полная мощность трансформатора в номинальном режиме,
— полная мощность трансформатора в номинальном режиме,  , т.е. полная мощность трех фаз трансформатора:
, т.е. полная мощность трех фаз трансформатора:  (см. гл. 3);
(см. гл. 3);  – номинальные напряжения, т. е. линейные напряжения первичной и вторичной обмоток при любой схеме соединений в режиме холостого хода;
– номинальные напряжения, т. е. линейные напряжения первичной и вторичной обмоток при любой схеме соединений в режиме холостого хода;  —потери в режимах холостого хода и короткого замыкания в ваттах на три фазы;
—потери в режимах холостого хода и короткого замыкания в ваттах на три фазы;  — напряжение короткого замыкания в процентах номинального напряжения;
— напряжение короткого замыкания в процентах номинального напряжения;  — ток холостого хода в процентах номинального тока;
— ток холостого хода в процентах номинального тока;  или — схема и группа соединений.
или — схема и группа соединений.
Рис.1.Схема включения трансформатора напряжения:1 — первичная обмотка; 2 — магнитопровод; 3 — вторичная обмотка.
Для питания вторичных цепей трансформаторы напряжения могут устанавливаться как на шинах подстанции, так и на каждом присоединении. Прежде чем приступить к электромонтажу, следует провести осмотр ТН и проверить целостность изоляции, исправность швов армировки и уровень масла у масляных трансформаторов. При установке первичная и вторичная обмотки ТН в целях безопасности заворачиваются, поскольку случайное соприкосновении вторичной обмоток с проводами сварки, освещения и т.п. может привести к появлению на выводах первичной обмотки высокого напряжения, опасного для человеческой жизни. Чтобы обслуживание вторичных цепей при эксплуатации было безопасным, обязательно производится заземление вторичной обмотки трансформатора и его корпуса. Таким образом, устраняется возможность перехода высокого напряжения во вторичные цепи при пробое изоляции. Номинальный коэффициент трансформации определяется следующим выражением:  где U1ном и U2ном - номинальные первичное и вторичное напряжения соответственно. Рассеяние магнитного потока и потери в сердечнике приводят к погрешности измерения
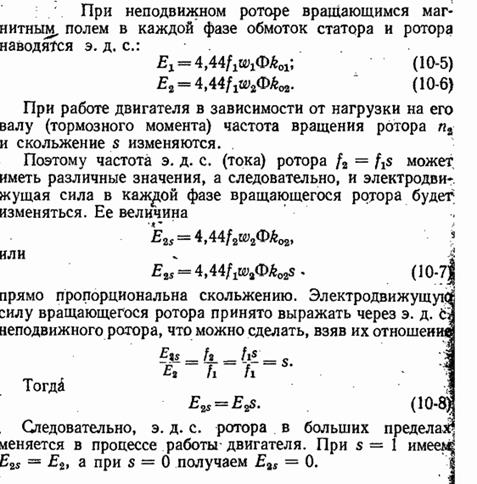
где U1ном и U2ном - номинальные первичное и вторичное напряжения соответственно. Рассеяние магнитного потока и потери в сердечнике приводят к погрешности измерения 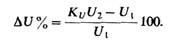 Так же как и в трансформаторах тока, вектор вторичного напряжения сдвинут относительно вектора первичного напряжения не точно на угол 180°. Это определяет угловую погрешность. В зависимости от номинальной погрешности различают классы точности 0,2; 0,5; 1; 3. Погрешность зависит от конструкции магнитопровода, магнитной проницаемости стали и от cosφ2, т.е. от вторичной нагрузки. В конструкции трансформаторов напряжения предусматривается компенсация погрешности по напряжению путем некоторого уменьшения числа витков первичной обмотки, а также компенсация угловой погрешности за счет специальных компенсирующих обмоток. Суммарное потребление обмоток измерительных приборов и реле, подключенных к вторичной обмотке трансформатора напряжения, не должно превышать номинальную мощность трансформатора напряжения, так как в противном случае это приведет к увеличению погрешностей. Подключая измерительные приборы и устройства защиты к ТН, следует учитывать тот факт, что включение большого количества электроприборов приводит к повышению значения тока во вторичной обмотке и увеличению погрешности измерения. Поэтому следите за тем, чтобы полная мощность подключенных приборов к трансформатору напряжения не превышала максимально допустимой мощности нагрузки ТН, указанной в паспорте. В случае если мощность нагрузки превышает номинальную мощность трансформатора для требуемого класса точности, необходимо установить еще один трансформатор напряжения и часть приборов присоединить к нему. В зависимости от назначения могут применяться трансформаторы напряжения с различными схемами соединения обмоток. Для измерения трех междуфазных напряжений можно использовать два однофазных двухобмоточных трансформатора НОМ, НОС, НОЛ, соединенных по схеме открытого треугольника (рис. 2., а), а также трехфазные двухобмоточные трансформаторы НТМК, обмотки которых соединены в звезду (рис. 2., б). Для измерения напряжения относительно земли могут применяться три однофазных трансформатора, соединенных по схеме Y0 /Y0, или трехфазные трехобмоточные трансформаторы НТМИ или НАМИ (рис.2. б). В последнем случае обмотка, соединенная в звезду, используется для присоединения измерительных приборов, а к обмотке, соединенной в разомкнутый треугольник, присоединяется реле защиты от замыканий на землю. Таким же образом в трехфазную группу соединяются однофазные трехобмоточные трансформаторы типа ЗНОМ и каскадные трансформаторы НКФ.
Так же как и в трансформаторах тока, вектор вторичного напряжения сдвинут относительно вектора первичного напряжения не точно на угол 180°. Это определяет угловую погрешность. В зависимости от номинальной погрешности различают классы точности 0,2; 0,5; 1; 3. Погрешность зависит от конструкции магнитопровода, магнитной проницаемости стали и от cosφ2, т.е. от вторичной нагрузки. В конструкции трансформаторов напряжения предусматривается компенсация погрешности по напряжению путем некоторого уменьшения числа витков первичной обмотки, а также компенсация угловой погрешности за счет специальных компенсирующих обмоток. Суммарное потребление обмоток измерительных приборов и реле, подключенных к вторичной обмотке трансформатора напряжения, не должно превышать номинальную мощность трансформатора напряжения, так как в противном случае это приведет к увеличению погрешностей. Подключая измерительные приборы и устройства защиты к ТН, следует учитывать тот факт, что включение большого количества электроприборов приводит к повышению значения тока во вторичной обмотке и увеличению погрешности измерения. Поэтому следите за тем, чтобы полная мощность подключенных приборов к трансформатору напряжения не превышала максимально допустимой мощности нагрузки ТН, указанной в паспорте. В случае если мощность нагрузки превышает номинальную мощность трансформатора для требуемого класса точности, необходимо установить еще один трансформатор напряжения и часть приборов присоединить к нему. В зависимости от назначения могут применяться трансформаторы напряжения с различными схемами соединения обмоток. Для измерения трех междуфазных напряжений можно использовать два однофазных двухобмоточных трансформатора НОМ, НОС, НОЛ, соединенных по схеме открытого треугольника (рис. 2., а), а также трехфазные двухобмоточные трансформаторы НТМК, обмотки которых соединены в звезду (рис. 2., б). Для измерения напряжения относительно земли могут применяться три однофазных трансформатора, соединенных по схеме Y0 /Y0, или трехфазные трехобмоточные трансформаторы НТМИ или НАМИ (рис.2. б). В последнем случае обмотка, соединенная в звезду, используется для присоединения измерительных приборов, а к обмотке, соединенной в разомкнутый треугольник, присоединяется реле защиты от замыканий на землю. Таким же образом в трехфазную группу соединяются однофазные трехобмоточные трансформаторы типа ЗНОМ и каскадные трансформаторы НКФ.
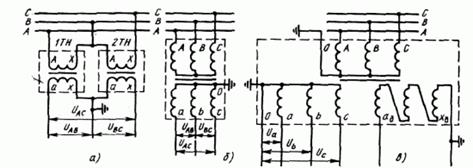
Рис.2. Схемы соединения обмоток трансформаторов напряжения
По конструкции различают трехфазные и однофазные трансформаторы. Трехфазные трансформаторы напряжения применяются при напряжении до 18 кВ, однофазные — на любые напряжения. По типу изоляции трансформаторы могут быть сухими, масляными и с литой изоляцией. Обмотки сухих трансформаторов выполняются проводом ПЭЛ, а изоляцией между обмотками служит электрокартон. Такие трансформаторы применяются в установках до 1000 В (НОС-0,5 - трансформатор напряжения однофазный, сухой, на 0,5 кВ). Трансформаторы напряжения с масляной изоляцией применяются на напряжение 6 - 1150 кВ в закрытых и открытых распределительных устройствах. В этих трансформаторах обмотки и магнитопровод залиты маслом, которое служит для изоляции и охлаждения. Следует отличать однофазные двухобмоточные трансформаторы НОМ-6, НОМ-10, НОМ-15, НОМ-35 от однофазных трехобмоточных ЗНОМ-15, ЗНОМ-20, ЗНОМ-35. Для обеспечения нормальной работы, измерительный трансформатор напряжения должен быть защищен от токов короткого замыкания со стороны нагрузки, поскольку они вызывают перегрев и повреждение изоляции обмоток ТН, а также приводят к возникновению короткого замыкания в самом трансформаторе. С этой целью во всех не заземленных проводах устанавливаются автоматические выключатели. Кроме этого во вторичных цепях трансформатора напряжения предусматривается установка рубильника, для создания видимого разрыва электрической цепи. Защита первичной обмотки от повреждений выполняется при помощи предохранителей.
Ответ:
Электромагнитный момент АД.
Ответ: Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент М пропорционален электромагнитной мощности: М = Рэм /ω1 (13.11) где ω1 = 2 π n1 /60 = 2π f1 (13.12) - угловая синхронная скорость вращения. Подставив в (13.11) значение электромагнитной мощности по (13.5), получим М = Рэ2/ (ω1 s) = m1 I ′ 22 r′2 /(ω1 s) (13.13) т. е. электромагнитный момент асинхронного двигателя пропорционален мощности электрических потерь в обмотке ротора. Если значение тока ротора по выражению (12.25) подставить в (13.13), то получим формулу электромагнитного момента асинхронной машины (Н  м):
м):
М =  (13.14) Параметры схемы замещения асинхронной машины r1, r '2 , х1 и х'2 , входящие в выражение (13.14), являются постоянными, так как их значения при изменениях нагрузки машины остается практически неизменными. Также постоянными можно считать напряжение на обмотке фазы статора U1 и частоту f1. В выражении момента M единственная переменная величина — скольжение s, которое для различных режимов работы асинхронной машины может принимать разные значения в диапазоне от + ∞ до - ∞ (см. рис. 10.1). Рассмотрим зависимость момента от скольжения M = f (s) при U1 = const, f1 = const и постоянных параметрах схемы замещения. Эту зависимость принято называть механической характеристикой асинхронной машины. Анализ выражения (13.14), представляющего собой аналитическое выражение механической характеристики M = f (s), показывает, что при значениях скольжения s = 0 и s = ∞ электромагнитный момент М = 0. Из этого следует, что механическая характеристика M = f (s) имеет максимум. Для определения величины критического скольжения sкр, соответствующего максимальному моменту, необходимо взять первую производную от (13.14) и приравнять ее нулю: dM /ds = 0. В результате sкр = ± r/2 /
(13.14) Параметры схемы замещения асинхронной машины r1, r '2 , х1 и х'2 , входящие в выражение (13.14), являются постоянными, так как их значения при изменениях нагрузки машины остается практически неизменными. Также постоянными можно считать напряжение на обмотке фазы статора U1 и частоту f1. В выражении момента M единственная переменная величина — скольжение s, которое для различных режимов работы асинхронной машины может принимать разные значения в диапазоне от + ∞ до - ∞ (см. рис. 10.1). Рассмотрим зависимость момента от скольжения M = f (s) при U1 = const, f1 = const и постоянных параметрах схемы замещения. Эту зависимость принято называть механической характеристикой асинхронной машины. Анализ выражения (13.14), представляющего собой аналитическое выражение механической характеристики M = f (s), показывает, что при значениях скольжения s = 0 и s = ∞ электромагнитный момент М = 0. Из этого следует, что механическая характеристика M = f (s) имеет максимум. Для определения величины критического скольжения sкр, соответствующего максимальному моменту, необходимо взять первую производную от (13.14) и приравнять ее нулю: dM /ds = 0. В результате sкр = ± r/2 /  (13.15). Подставив значение критического скольжения (по 13.15) в выражение электромагнитного момента (13.14), после ряда преобразований получим выражение максимального момента (Н м): Mmax = ±
(13.15). Подставив значение критического скольжения (по 13.15) в выражение электромагнитного момента (13.14), после ряда преобразований получим выражение максимального момента (Н м): Mmax = ±  (13.16). В (13.15) и (13.16) знак плюс соответствует двигательному, а знак минус — генераторному режиму работы асинхронной машины. Для асинхронных машин общего назначения активное сопротивление обмотки статора r1 намного меньше суммы индуктивных сопротивлений: r1 << (x1 +х'2). Поэтому, пренебрегая величиной r1, получим упрощенные выражения критического скольжения Sкр ≈ ± r/2 /(x1 +x/2) (13.17) и максимального момента (Н м) Mmax = ±
(13.16). В (13.15) и (13.16) знак плюс соответствует двигательному, а знак минус — генераторному режиму работы асинхронной машины. Для асинхронных машин общего назначения активное сопротивление обмотки статора r1 намного меньше суммы индуктивных сопротивлений: r1 << (x1 +х'2). Поэтому, пренебрегая величиной r1, получим упрощенные выражения критического скольжения Sкр ≈ ± r/2 /(x1 +x/2) (13.17) и максимального момента (Н м) Mmax = ±  (13.18)
(13.18)

Рис. 13.2. Зависимость режимов работы асинхронной машины от скольжения
Анализ выражения (13.16) показывает, что максимальный момент асинхронной машины в генераторном режиме больше, чем в двигательном (Mmax г > Мmах д). На рис. 13.2 показана механическая характеристика асинхронной машины М = f (s) при U1 = const. На этой характеристике указаны зоны, соответствующие различным режимам работы: двигательный режим (0 < s ≤ 1), когда электромагнитный момент М является вращающим; генераторный режим ( - ∞ < s < 0) и тормозной режим противовключением (1 < s < + ∞), когда электромагнитный момент М является тормозящим. Из (13.14) следует, что электромагнитный момент асинхронного двигателя пропорционален квадрату напряжения сети: M ≡ U12. Это в значительной степени отражается на эксплуатационных свойствах двигателя: даже небольшое снижение напряжения сети вызывает заметное уменьшение вращающего момента асинхронного двигателя. Например, при уменьшении напряжения на 10% относительно номинального (U1 = 0,9Uном) электромагнитный момент двигателя уменьшается на 19% : M/ =0,92 M, где М— момент при номинальном напряжении сети, а М/ — момент при пониженном напряжении. Для анализа работы асинхронного двигателя удобнее воспользоваться механической характеристикой M = f (s), представленной на рис. 13.3. При включении двигателя в сеть магнитное поле статора, не обладая инерцией, сразу же начинает вращение с синхронной частотой n1, в то же время ротор двигателя под влиянием сил инерции в начальный момент пуска остается неподвижным (n2 = 0) и скольжение s = 1. Подставив в (13.14) скольжение s = 1, получим выражение пускового момента асинхронного двигателя (Н м):
Мп =  (13.19)
(13.19)

Рис 13.3. Зависимость электромагнитного момента асинхронного двигателя от скольжения.
Под действием этого момента начинается вращение ротора двигателя, при этом скольжение уменьшается, а вращающий момент возрастает в соответствии с характеристикой М = f (s). При критическом скольжении sкр момент достигает максимального значения Мmах. С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент М начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента х.х. M0 и полезного нагрузочного момента (момента на валу двигателя) М2, т. е. М = М0 + M2 = Mст (13.20). Следует иметь в виду, что при скольжениях, близких к единице (пусковой режим двигателя), параметры схемы замещения асинхронного двигателя заметно изменяют свои значения. Объясняется это в основном двумя факторами: усилением магнитного насыщения зубцовых слоев статора и ротора, что ведет к уменьшению индуктивных сопротивлений рассеяния x1 и х'2, и эффектом вытеснения тока в стержнях ротора, что ведет к увеличению активного сопротивления обмотки ротора r/2. Поэтому параметры схемы замещения асинхронного двигателя, используемые при расчете электромагнитного момента по (13.14), (13.16) и (13.18), не мoгyт быть использованы для расчета пускового момента по (13.19).
Рабочие характеристики АД.
Ответ: Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const. Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 - s). Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1. По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 - 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2' угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2' возрастают электрические потери в роторе.
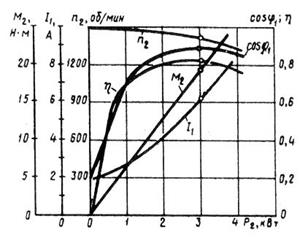
Рис. 1. Рабочие характеристики асинхронного двигателя
Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.

Рис. 2. Векторная диаграмма асинхронного двигателя при небольшой нагрузке
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода.Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 2). Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 - 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной.Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 3 представлены графики зависимости cos φ1, асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).

Рис. 3. Зависимость cos φ1,от нагрузки при соединении обмотки статора двигателя звездой (1) и треугольником (2)
Регулирование скорости АД.
Ответ: Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей. Частота вращения ротора равна  . При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
. При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов  . Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов. Рассмотрим основные способы регулировки.
. Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов. Рассмотрим основные способы регулировки.
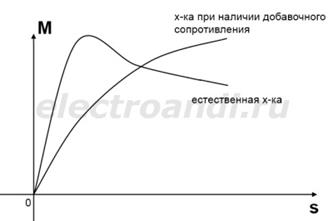
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора: Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики. Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором. Регулирование скорости двигателя с помощью изменения напряжения питания:

Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя. Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя. Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания:
 При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразов
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразов
Последнее изменение этой страницы: 2016-06-08
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...