Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Управление процессом транспортирования горной массы
Управление транспортированием полезного ископаемого и пород вскрыши из карьера включает в себя две стадии:
установление объемов перевозок по каждому виду горной массы, для каждого вида транспорта и каждого грузопотока, а также расчет соответствующей необходимой численности транспортных средств, обеспечивающих эти объемы перевозок на рассматриваемый период;
оперативно-диспетчерское управление транспортным процессом, включающее распределение транспортных средств между пунктами погрузки и разгрузки, регулирование движения транспортных средств, контроль и учет выполненных объемов работы. Первая стадия осуществляется одновременно с текущим и оперативным планированием выемочно-погрузочных работ.
Расчет объемов перевозок и числа единиц подвижного состава выполняют на основе планируемых объемов вскрышных и добычных работ. При этом нередко планы экскавации корректируют в зависимости от реального наличия транспортных средств по условию их ритмичного использования и т. д.
В конечном счете цель планирования транспортных работ сводится к определению сменной и суточной потребности в подвижном составе для каждого экскаватора или грузопотока н для всего карьера в целом. Базируясь на установленных плановых показателях, транспортные цехи ежесменно направляют в карьер соответствующее число локомотивосоставов и автосамосвалов, после чего с учетом фактического их наличия в карьере устанавливают окончательные объемы погрузочно-транспортных работ, подлежащих выполнению.
Основу управления карьерным транспортом составляет оперативно-диспетчерское (сменное) управление, сущность и особенности которого рассмотрим для железнодорожного и автомобильного транспорта.
Оперативно-диспетчерское управление при железнодорожном транспорте. Основной целью оперативного управления работой карьерного транспорта в течение смены является обеспечение выполнения плановых заданий всеми работающими в смене экскаваторами при условии наилучшего использования подвижного состава. Особенности управления транспортным процессом зависят от многих факторов: требований к качеству добытого полезного ископаемого, схемы путевого развития, типов, назначения и принадлежности работающего подвижного состава, условий и характеристик погрузки, разгрузки и движения.
В любом случае работа железнодорожного транспорта может осуществляться только при условии постоянного управления, В общем виде управление сводится к выдаче команд машинистам локомотивов на занятие того или иного участка транспортной сети (перегона, пути на обменном пункте и т.д.), а также команд исполнителям, обеспечивающим транспортный процесс; переключению стрелочных переводов, погрузке и выгрузке вагонов, сцепке и расцепке составов и т. д. Как указано выше, можно выделить три основных задачи внутрисменного управления железнодорожным транспортом, решаемых карьерной диспетчерской службой; выбор адреса погрузки (и разгрузки) локомотивосоставов, управление движением поездов, учет работы, выполняемой транспортом. Технически управление осуществляется в основном с помощью средств СЦБ и поездной радиосвязи. Выбор адреса погрузки для каждого локомотивосостава осуществляется с учетом реальной производственной ситуации в каждый данный момент времени (наличие свободных экскаваторов, находящихся в работе и ожидающих составов, степень выполнения плановых объемов и показатели качества полезного ископаемого, равномерность загрузки оборудования и т. д.) в следующем порядке.
1.Выбирают все готовые к погрузке экскаваторы, а также те, которые будут готовы к погрузке (освободятся) через заданный интервал времени  .
.
2.Устанавливают тип и качество горной массы в каждом i-м забое и определяют текущий (на данный момент) коэффициент выполнения сменного задания каждым j-м экскаватором kj.
3.Среди выбранных пунктов погрузки находят экскаватор с горной массой требуемого сорта и наименьшим значением kij; при наличии нескольких таких экскаваторов, из них выбирают тот, который дольше других находился в простое (в ожидании порожняка, из-за аварии и т.д.).
4.Проверяется условие 
 - соответственно текущее и плановое качество полезного ископаемого;
- соответственно текущее и плановое качество полезного ископаемого;  - допустимые отклонения качества от планового.
- допустимые отклонения качества от планового.
В случае, если это условие выдерживается, выбранный забой рассматривают как возможный адрес погрузки, В противном случае последовательно рассматривают другие свободные и освобождающиеся в течение экскаваторы и из них выбирают такой, который характеризуется kj = min.
5.Если из подлежащих рассмотрению экскаваторов ни один не обеспечивает выполнение, указанного условия, в качестве адреса погрузки выбирают забой, который после очередной погрузки может обеспечить его выполнение.
Здесь имеется в виду, что адрес погрузки выбирают для каждого состава последовательно, по мере прибытия составов на распределительный пункт, из числа забоев, имеющих транспортную связь с данным пунктом. В частных случаях «зона поиска» адреса может ограничиваться по условию минимизации порожняковых или общих перегонов составов.
Аналогичным образом осуществляют поиск адреса разгрузки составов (при наличии выбора).
Оперативное управление работой автомобильного транспорта. Процесс работы карьерного автомобильного транспорта отличается от транспортирования железнодорожным транспортом значительно большей интенсивностью движения и числом работающих транспортных единиц, динамичностью (частой сменой направлений) грузопотоков, простотой организации движения.
До настоящего времени на большинстве карьеров работа автотранспорта в течение смены является либо вообще неуправляемым процессом (движение по закрытому циклу), либо управляющие воздействия в виде перераспределения автомашин осуществляются периодически, в связи с выбытием из работы отдельных экскаваторов, уменьшением числа работающих автомашин и другими нарушениями процесса. Однако задача повышения эффективности производства требует разработки и внедрения методов и средств постоянного оперативного управления процессом, что возможно при переходе на организацию движения автомашин по открытому циклу.
При такой организации автосамосвалы закрепляют не за отдельными, а за группой экскаваторов и управление процессом заключается в выборе адреса погрузки и выдаче соответствующей команды каждому следующему в карьер порожнему самосвалу. Аналогичное управление возможно и для потока груженых самосвалов.
Цель оперативного управления автотранспортом та же, что и при использовании железнодорожного транспорта: выполнение сменного планового задания каждым экскаватором и в целом по карьеру, как по объемам полезного ископаемого и вскрыши. так н по качеству выдаваемой горной массы. При этом возможно несколько постановок задачи оперативного управления, в зависимости от конкретных условий и требований к результатам процесса.
1.Минимизация простоев выемочного и транспортного оборудования обеспечивается при выборе адреса погрузки по максимальному времени ожидания экскаваторов или самосвалов:
 (4)
(4)
где А - адрес (номер экскаватора), по которому направляется очередной прибывший на распределительный пункт автосамосвал; i - номер свободного экскаватора (из N работающих), простаивающего в течение времени  .
.
В случае отсутствия простоев экскаваторов автосамосвалы адресуют к экскаваторам, освобождающимся в ближайшее время, на основе выбора минимального времени оставшейся работы, например:
 (5)
(5)
где j - номер экскаватора с минимальным временем, оставшимся до освобождения от работы  ;
;  - интервал между данным моментом и отправкой к соответствующему экскаватору последней автомашины; tn - время погрузки (имеется в виду, что tп>tин для всех j).
- интервал между данным моментом и отправкой к соответствующему экскаватору последней автомашины; tn - время погрузки (имеется в виду, что tп>tин для всех j).
2.Соблюдение заданной пропорциональности в использовании экскаваторов, например, для приоритетного подвигания того или иного забоя. Принцип выбора адреса погрузки тот же, однако при сравнении времени ожидания различных экскаваторов вводят коэффициенты приоритета, устанавливаемые на основе экономической оценки или задаваемые в соответствии с необходимыми пропорциями подвигания фронта работ.
3.Поддержание заданного качества полезного ископаемого в грузопотоке обеспечивается с помощью различных моделей, в частности, возможно управление по критерию минимизации отклонении качества полезного ископаемого в потоке груженых автомашин от заданного содержания полезного компонента  :
:
 (6)
(6)
где  - число самосвалов, погруженных i-м и j-м экскаваторами к моменту времени
- число самосвалов, погруженных i-м и j-м экскаваторами к моменту времени  ;
;  - отклонение качества полезного ископаемого в i-м забое
- отклонение качества полезного ископаемого в i-м забое  от заданного ;
от заданного ;  ;
;  - аналогичная величина для j-го забоя; i= 1, 2, .... k – 1-номера экскаваторов, ведущих погрузку полезного ископаемого с содержанием
- аналогичная величина для j-го забоя; i= 1, 2, .... k – 1-номера экскаваторов, ведущих погрузку полезного ископаемого с содержанием  - номера экскаваторов, ведущих погрузку полезного ископаемого с содержанием
- номера экскаваторов, ведущих погрузку полезного ископаемого с содержанием  .
.
Для выполнения данного критерия при выработке адреса каждому самосвалу в момент рассчитывают величину  и зависимости от знака отклонения выбирают забой, позволяющий после очередной погрузки максимально улучшить этот показатель:
и зависимости от знака отклонения выбирают забой, позволяющий после очередной погрузки максимально улучшить этот показатель:  .
.
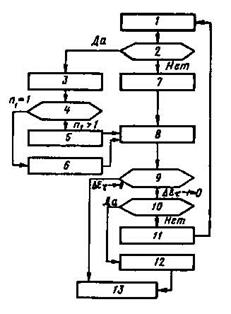
Рис. 3. Алгоритм оперативного управления работой карьерного транспорта:
1-поступление запроса на выработку адреса; 2 - проверка наличия свободных экскаваторов; 3 - ранжирование свободных экскаваторов по приоритету; 4 - проверка числа экскаваторов с первым приоритетом; 5- выбор адреса по максимальному времени простоя: fпр=max; 6 - выбор адреса по приоритету; 7-выбор адреса по минимуму времени оставшейся работы:tос=min; 8 - расчет текущего отклонения качества ; 9 - проверка улучшения величины при реализации выбранного адреса; 10- проверка, все ли экскаваторы просмотрены; 11 - исключение выбранного экскаватора из рассмотрения; 12 - выбор адреса по условию  ; 13 - выдача выбранного адреса погрузки.
; 13 - выдача выбранного адреса погрузки.
Наиболее полно могут быть решены задачи оптимального оперативного управления при использовании нескольких критериев, иерархически взаимосвязанных в единой модели. В настоящее время для этой цели разработано несколько алгоритмов. Один из возможных вариантов алгоритма оперативного управления, использующий рассмотренные постановки задачи, приведен на рис.3.
Для успешной реализации изложенных методов и моделей оперативного управления карьерным транспортом, в особенности автомобильным, создают автоматизированные системы управления, которые могут обеспечивать решение задач оперативного планирования, регулирования, контроля и учета с достаточной полнотой, оперативностью и точностью.
Последнее изменение этой страницы: 2017-07-16
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...