Категории:
ДомЗдоровьеЗоологияИнформатикаИскусствоИскусствоКомпьютерыКулинарияМаркетингМатематикаМедицинаМенеджментОбразованиеПедагогикаПитомцыПрограммированиеПроизводствоПромышленностьПсихологияРазноеРелигияСоциологияСпортСтатистикаТранспортФизикаФилософияФинансыХимияХоббиЭкологияЭкономикаЭлектроника
Пуск АД, электродвигатели с улучшенным пуском.
Ответ: Пусковыесвойства двигателей: При пуске ротор двигателя, преодолевая момент нагрузки и момент инерции, разгоняется от частоты вращения п= 0 доп . Скольжение при этом меняется от sп = 1 до s. При пуске должны выполняться два основных требования: вращающий момент должен бить больше момента сопротивления (Мвр>Мс) и пусковой ток Iп должен быть по возможности небольшим. В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска: прямой пуск, пуск с использованием дополнительных сопротивлений, пуск при пониженном напряжении и др. Ниже различные способы пуска рассматриваются более подробно. Прямой пуск: Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. Схема прямого пуска приведена на рис. 3.22. При включении рубильника в первый момент скольжение s = l, а приведенный ток в роторе и равный ему ток статора  , (3.37)
, (3.37)
максимальны (см.п.3.19 при s=1). По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока kI = IП / I1НОМ = ( 5,…,7), причем большее значение относится к двигателям большей мощности.

Рис. 3.22
Значение пускового момента находится из (3.23) при s = 1:
 .(3.38). Из рис. 3.18 видно, что пусковой момент близок к номинальному и значительно меньше критического. Для серийных двигателей кратность пускового момента МП/ МНОМ = (1.0,…,1.8). Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться. С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места. В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт). Пуск двигателей с улучшенными пусковыми свойствами:Улучшение пусковых свойств асинхронных двигателей достигается использованием эффекта вытеснения тока в роторе за счет специальной конструкции беличьей клетки. Эффект вытеснения тока состоит в следующем: потокосцепление и индуктивное сопротивление X2 проводников в пазу ротора тем выше, чем ближе ко дну паза они расположены (рис.3.23). Также X2 прямо пропорционально частоте тока ротора. Следовательно, при пуске двигателя, когда s=1 и f2 = f1 = 50 Гц , индуктивное сопротивление X2 = max и под влиянием этого ток вытесняется в наружный слой паза. Плотность тока j по координате h распределяется по кривой, показанной на рис.3.24. В результате ток в основном проходит по наружному сечению проводника, т.е. по значительно меньшему сечению стержня, и, следовательно, активное сопротивление обмотки ротора R2 намного больше, чем при нормальной работе. За счет этого уменьшается пусковой ток и увеличивается пусковой момент МП (см. (3.37), (3.38) ). По мере разгона двигателя скольжение и частота тока ротора падает и к концу пуска достигает 1 – 4 Гц. При такой частоте индуктивное сопротивление мало и ток распределяется равномерно по всему сечению проводника. При сильно выраженном эффекте вытеснения тока становится возможным прямой пуск при меньших бросках тока и больших пусковых моментах. К двигателям с улучшенными пусковыми свойствами относятся двигатели, имеющие роторы с глубоким пазом, с двойной беличьей клеткой и некоторые другие.
.(3.38). Из рис. 3.18 видно, что пусковой момент близок к номинальному и значительно меньше критического. Для серийных двигателей кратность пускового момента МП/ МНОМ = (1.0,…,1.8). Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться. С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места. В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт). Пуск двигателей с улучшенными пусковыми свойствами:Улучшение пусковых свойств асинхронных двигателей достигается использованием эффекта вытеснения тока в роторе за счет специальной конструкции беличьей клетки. Эффект вытеснения тока состоит в следующем: потокосцепление и индуктивное сопротивление X2 проводников в пазу ротора тем выше, чем ближе ко дну паза они расположены (рис.3.23). Также X2 прямо пропорционально частоте тока ротора. Следовательно, при пуске двигателя, когда s=1 и f2 = f1 = 50 Гц , индуктивное сопротивление X2 = max и под влиянием этого ток вытесняется в наружный слой паза. Плотность тока j по координате h распределяется по кривой, показанной на рис.3.24. В результате ток в основном проходит по наружному сечению проводника, т.е. по значительно меньшему сечению стержня, и, следовательно, активное сопротивление обмотки ротора R2 намного больше, чем при нормальной работе. За счет этого уменьшается пусковой ток и увеличивается пусковой момент МП (см. (3.37), (3.38) ). По мере разгона двигателя скольжение и частота тока ротора падает и к концу пуска достигает 1 – 4 Гц. При такой частоте индуктивное сопротивление мало и ток распределяется равномерно по всему сечению проводника. При сильно выраженном эффекте вытеснения тока становится возможным прямой пуск при меньших бросках тока и больших пусковых моментах. К двигателям с улучшенными пусковыми свойствами относятся двигатели, имеющие роторы с глубоким пазом, с двойной беличьей клеткой и некоторые другие.

Рис.3.23 Рис. 3.24
Двигатели с глубокими пазами: Как показано на рис.3.25, паз ротора выполнен в виде узкой щели, глубина которой примерно в 10 раз больше, чем ее ширина. В эти пазы-щели укладывается обмотка в виде узких медных полос. Распределение магнитного потока показывает, что индуктивность и индуктивное сопротивление в нижней части проводника значительно больше, чем в верхней части. Поэтому при пуске ток вытесняется в верхнюю часть стержня и активное сопротивление значительно увеличивается. По мере разгона двигателя скольжение уменьшается, и плотность тока по сечению становится почти одинаковой. В целях увеличения эффекта вытеснения тока глубокие пазы выполняются не только в виде щели, но и трапецеидальной формы. В этом случае глубина паза несколько меньше, чем при прямоугольной форме.


Рис.3.25 Рис.3.26
Двигатели с двойной клеткой: В таких двигателях обмотки ротора выполняются в виде двух клеток (рис.3.26): во внешних пазах 1 размещается обмотка из латунных проводников, во внутренних 2 – обмотка из медных проводников. Таким образом, внешняя обмотка имеет большее активное сопротивление, чем внутренняя. При пуске внешняя обмотка сцепляется с очень слабым магнитным потоком, а внутренняя – сравнительно сильным полем. В результате ток вытесняется во внешнюю клетку, а во внутренней тока почти нет. По мере разгона двигателя ток из внешней клетки переходит во внутреннюю и при s =sНОМ протекает в основном по внутренней клетке. Ток во внешней клетке при этом сравнительно небольшой. Результирующий пусковой момент, складывающийся из моментов от двух клеток, значительно больше, чем у двигателей нормальной конструкции, и несколько больше, чем у двигателей с глубоким пазом. Однако следует иметь в виду, что стоимость двигателей с двойной клеткой ротора выше. Пуск переключением обмотки статора: Если при нормальной работе двигателя фазы статора соединены в треугольник, то, как показано на рис.3.27, при пуске первоначально они соединяются в звезду. Для этого сначала включается выключатель Q, а затем переключатель S ставится в нижнее положение Пуск. В таком положении концы фаз Х, Y, Z соединены между собой, т.е. фазы соединены звездой. При этом напряжение на фазе в √3 раз меньше линейного. В результате линейный ток при пуске в 3 раза меньше, чем при соединении треугольником. При разгоне ротора в конце пуска переключатель S переводится в верхнее положение и, как видно из рис. 3.27, фазы статора пересоединяются в треугольник. Недостатком этого способа является то, что пусковой момент также уменьшается в 3 раза, так как момент пропорционален квадрату фазного напряжения, которое в √3 раз меньше при соединении фаз звездой. Поэтому такой способ применим при небольшом нагрузочном моменте и только для двигателей, нормально работающих при соединении обмоток статора в треугольник.

Рис.3.27
Пуск при включении добавочных резисторов в цепь статора: (рис. 3.28). Перед пуском выключатель (пускатель) находится в разомкнутом состоянии и замыкается выключатель Q1. При этом в цепь статора включены добавочные резисторы RДОБ. В результате обмотка статора питается пониженным напряжением U1n = U1НОМ – InRДОБ. После разгона двигателя замыкается выключатель Q2 и обмотка статора включается на номинальное напряжение U1НОМ. Подбором RДОБможно ограничить пусковой ток до допустимого. Следует иметь в виду, что момент при пуске, пропорциональный U21П, будет меньше и составляет (U1П / U1НОМ)2 номинального. Важно отметить, что при этом способе пуска значительны потери в сопротивлении RДОБ (RДОБI21n). Можно вместо резисторов RДОБ включить катушки с индуктивным сопротивлением ХДОБ, близким к RДОБ. Применение катушек позволяет уменьшить потери в пусковом сопротивлении.


Рис.3.29 Рис.3.28
Автотрансформаторный пуск: Кроме указанных способов можно применить так называемый автотрансформаторный пуск. Соответствующая схема показана на рис.3.29. Перед пуском переключатель S устанавливается в положение 1, а затем включается автотрансформатор и статор питается пониженным напряжением U1П. Двигатель разгоняется при пониженном напряжении и в конце разгона переключатель S переводится в положение 2 и статор питается номинальным напряжением U1ном. Если коэффициент трансформации понижающего трансформатора n, тогда ток I на его входе будет вn раз меньше. Кроме того, пусковой ток будет также в n раз меньше, т.е. ток при пуске в сети будет вn2 раз меньше, чем при непосредственном пуске. Этот способ, хотя и лучше рассмотренных в п.3.14.7, но значительно дороже. Пуск двигателя с фазным ротором: Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора, как это показано на рис.3.30. Начала фаз обмоток ротора присоединяются к контактным кольцам и через щетки подключаются к пусковому реостату с сопротивлением Rp.
 Приведенное к обмотке статора сопротивление пускового реостата Rpрассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП= МПmaх = МК будет обеспечено. Тогда
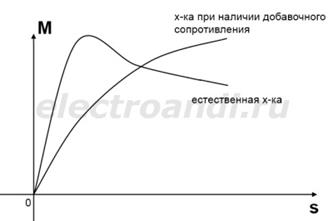
Приведенное к обмотке статора сопротивление пускового реостата Rpрассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП= МПmaх = МК будет обеспечено. Тогда  . Пуск двигателя происходит по кривой, показанной на рис.3.31. В момент пуска рабочая точка на механической характеристике находится в положении а, а при разгоне двигателя она перемещается по кривой 1, соответствующей полностью включенному реостату. При моменте, соответствующем точке е , включается первая ступень реостата и момент скачком увеличивается до точки b – рабочая точка двигателя переходит на кривую 2; в момент времени, соответствующей точке d, выключается вторая ступень реостата, рабочая точка скачком переходит в точку с и двигатель выходит на естественную характеристику 3 и затем в точку f. Реостат закорачивается, обмотка ротора замыкается накоротко, а щетки отводятся от колец.
. Пуск двигателя происходит по кривой, показанной на рис.3.31. В момент пуска рабочая точка на механической характеристике находится в положении а, а при разгоне двигателя она перемещается по кривой 1, соответствующей полностью включенному реостату. При моменте, соответствующем точке е , включается первая ступень реостата и момент скачком увеличивается до точки b – рабочая точка двигателя переходит на кривую 2; в момент времени, соответствующей точке d, выключается вторая ступень реостата, рабочая точка скачком переходит в точку с и двигатель выходит на естественную характеристику 3 и затем в точку f. Реостат закорачивается, обмотка ротора замыкается накоротко, а щетки отводятся от колец.

Таким образом, фазный ротор позволяет пускать в ход асинхронные двигатели большой мощности при ограниченном пусковом токе. Однако этот способ пуска связан со значительными потерями в пусковом реостате. Кроме того, двигатель с фазным ротором дороже двигателя с короткозамкнутым ротором. Поэтому двигатель с фазным ротором применяется лишь при больших мощностях и высоких требованиях к приводу.
Регулирование скорости АД.
Ответ: Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей. Частота вращения ротора равна  . При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
. При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов  . Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов. Рассмотрим основные способы регулировки.
. Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов. Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора: Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики. Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором. Регулирование скорости двигателя с помощью изменения напряжения питания:

Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя. Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя. Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания:
 При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя. При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю. Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1необходимо производить пропорционально квадратному корню изменения частоты f1. При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1. Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя. Регулирование скорости АД изменением числа пар полюсов: Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора. В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5. Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда - звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя. Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя. При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю. Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1необходимо производить пропорционально квадратному корню изменения частоты f1. При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1. Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя. Регулирование скорости АД изменением числа пар полюсов: Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора. В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5. Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда - звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя. Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Однофазный АД.
Ответ:
| Однофазные асинхронные двигателя выпускают от 5Вт до 10кВт. Данные двигателя используются: в приводе стиральных машин, холодильников, центрифуг, небольших обрабатывающих станков и т.д. Отметим, что однофазные АД по сравнению с трехфазными двигателями обычно имеют несколько худшие технические характеристики. Мощность однофазного АД составляет не более 70% от мощности трехфазного АД в том же габарите. Однофазные АД, кроме того, имеют более низкую перегрузочную способность. |
 Схема включения однофазного АД. Двигатель имеет на статоре две обмотки – основную (рабочею) и пусковую, которая используется для пуска АД. Ротор АД выполнен короткозамкнутым в виде беличьей клетки. Схема включения однофазного АД. Двигатель имеет на статоре две обмотки – основную (рабочею) и пусковую, которая используется для пуска АД. Ротор АД выполнен короткозамкнутым в виде беличьей клетки.
|
Рассмотрим принцип работы однофазного АД: Чтобы понять для чего нужна пусковая обмотка рассмотрим пример, когда двигатель подключен к сети 220В только на одну обмотку - рабочую. Однофазный ток I1 этой обмотки создает пульсирующие магнитное поле, которое можно разложить на два поля Фа и Фв,  имеющие равные амплитуды и вращаются в противоположные стороны с одинаковой скоростью. При неподвижном роторе магнитные поля Фа и Фв создают одинаковые по величине, но противоположны по знаку крутящиеся моменты М1 и М2 . Поэтому при пуске результирующий момент ( Мn= M1 – M2 ) равен нулю, и двигатель не может прийти во вращение даже без нагрузки на волу. В связи с этим для пуска однофазного АД и используется дополнительная пусковая обмотка, которая позволяет получить вращающееся магнитное поле, за счет которого обеспечивается начальный пусковой момент, который определяет направление вращение вала. имеющие равные амплитуды и вращаются в противоположные стороны с одинаковой скоростью. При неподвижном роторе магнитные поля Фа и Фв создают одинаковые по величине, но противоположны по знаку крутящиеся моменты М1 и М2 . Поэтому при пуске результирующий момент ( Мn= M1 – M2 ) равен нулю, и двигатель не может прийти во вращение даже без нагрузки на волу. В связи с этим для пуска однофазного АД и используется дополнительная пусковая обмотка, которая позволяет получить вращающееся магнитное поле, за счет которого обеспечивается начальный пусковой момент, который определяет направление вращение вала.
|
 Принципиальная схема однофазного асинхронного двигателя: Как известно из теории электрических машин, для получения вращающего магнитного поля на статоре двигателя должны быть расположены, как минимум две обмотки, смещенные в пространстве на определенный угол и обтекаемые переменными токами. В соответствии с этим пусковая обмотка укладывается на статоре двигателя со смещением ее оси на 90% по отношению к оси рабочей обмотки, а сдвиг токов обеспечивается включением в ее цепь дополнительного фазосдвигающего элемента, в качестве которого могут быть использованы: активный резистор, катушка индуктивности или конденсатор. Принципиальная схема однофазного асинхронного двигателя: Как известно из теории электрических машин, для получения вращающего магнитного поля на статоре двигателя должны быть расположены, как минимум две обмотки, смещенные в пространстве на определенный угол и обтекаемые переменными токами. В соответствии с этим пусковая обмотка укладывается на статоре двигателя со смещением ее оси на 90% по отношению к оси рабочей обмотки, а сдвиг токов обеспечивается включением в ее цепь дополнительного фазосдвигающего элемента, в качестве которого могут быть использованы: активный резистор, катушка индуктивности или конденсатор.
|
Синхронные электромашины:
Последнее изменение этой страницы: 2016-06-08
lectmania.ru. Все права принадлежат авторам данных материалов. В случае нарушения авторского права напишите нам сюда...